Сборка: http://www.parkflyer.ru/blogs/view_entry/8647/
Сcылки:
1) http://arduino.cc/en/Main/Software
2) https://code.google.com/p/multiwii/downloads/list
3) http://dl.dropboxusercontent.com/u/67301981/MW-download.zip
Драйвера для вин7 (х86, х64), 8, 8.1... : http://www.ftdichip.com/Drivers/CDM/CDM%20v2.10.00%20WHQL%20Certified.zip
Дополнение к видео
PITCH/ROLL/YAW PID and RATE
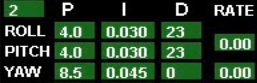
Для очень стабильного полёта мультикоптера, параметры PID должны быть установлены высоко. Но если вы хотите сделать некоторые акробатические маневры с этими настройками, мультикоптер начинает быстро раскачиваться. Одно из решений состоит в уменьшении PID, но это будет в ущерб статической устойчивости. Нужно найти необходимый баланс.
Два поля справа (RATE) определяют степень отмены номинальных PID (те, которые используются на
нейтральных положения ручек ROLL / PITCH / YAW) в связи с отклонением ROLL/PITCH/YAW. На самом деле только P и D параметры влияют на изменения. Цель этого параметра - получить больше маневренности. 0 = плавные расходы (для FPV или начинающих); 0,4 = для легкого акробатического полёта; 0,7 - для быстрого акробатического полёта; 1 - безумная скорость.
Если вы не знакомы с этим, просто оставить значения по умолчанию (0).
ALT PID

Эти значения для настройки функции удержания высоты. P, I, D имеют те же определения, что и для ROLL / PITCH / YAW. Но PID для удержания высоты, в настоящее время, больше не используется.
Значения, приведенные выше, не являются значения по умолчанию. После активации, необходимая высоты регулируется ручкой газа.
P and I Level

Определяет влияние акселерометра только в стабильном режиме(этот параметр не имеет никакого эффекта, если автоуровень отключить)
Если мультикоптер не стабилен после активации, нужно снизить P.
MAG

Это значение Р для режима удержания курса (компас). После того, как этот режим включен, компас будет держать курс до тех пор, пока ручка руля направления в нейтральном положении.
RATE EXPO

Этот блок с настройками дает возможность изменять расходы и экспоненту аналогично настройкам с вашего передатчика (если у вас компьютерный передатчик).
Также будет полезно ознакомится с теорией настройки контроллера MultiWii с официального сайта.
Мультикоптер использует закрытый контролируемый цикл для обеспечения его стабильности и маневренности.
Как и в большинстве мультироторных аппаратов, это пропорционально-интегрально-дифференциальный (ПИД(PID) регулятор.
Когда положение мультикоптера меняется относительно любой из осей pitch/roll/yaw (тангаж/крен/рыскание), гироскопы показывают угловое отклонение мультикоптера от начальной позиции.
Контроллер мультикоптера пытается исправить ошибку, рассчитанную между замерами на выходе контроллера (замеры гироскопов) и входной установки (положение ручек), и управляет моторами, чтобы попытаться вернуть мультикоптер в исходное положение.
Базовая настройка ПИД
Значения по умолчанию должны использоваться в качестве отправной точки, это поможет вам знать разницу после изменения некоторых параметров. Эти значение хорошо подходят для среднего мультикоптера.
1) Убедитесь, что центр тяжести находится в середине вашего мультикоптера (двигайте батарею, чтобы получить его) и пропеллеры отбалансированы.
2) Запустите моторы (газ до 50%). Если пропеллеры установлены, будьте осторожны (мультикоптер не должен подняться в воздух). Теперь посмотрите на график (в программе MultiwiiConf), линии должны быть прямыми (возможно барометр будет скакать).
Если линии скачут, значит есть нежелательная вибрация и её нужно устранить.
Имейте в виду, что Р – это основополагающая часть PID, которая является залогом хороших летных характеристик.
С установленными винтами:
1. Установите рекомендованные по умолчанию значения коэффициентов PID-регулятора;
2. Крепко и осторожно удерживайте мультикоптер в воздухе (ухватитесь за раму руками так, чтобы предотвратить возможные свободные вращения вокруг любой из осей мультикоптера, берегите руки и лицо;
3. Постепенно прибавляйте газ, стараясь добиться невесомости мультикоптера, когда сила тяжести уравновешивается подъёмной силой.
4. Попробуйте наклонить вниз мультикоптер вдоль направления каждой из осей моторов:
1) вы должны почувствовать реакцию, направленную на компенсирование вашего давления вдоль оси;
2) увеличивайте значение коэффициента Р до тех пор, пока не ощутите, что довольно сложно противостоять реакции мультикоптера;
3) теперь начинайте раскачивать мультикоптер, увеличивайте Р до тех пор, когда начнутся колебания и затем немного уменьшите.
5.Повторите для Yaw оси.
Без стабилизации вы почувствуете, что PID позволяет вам двигаться через некоторое время. Это нормально.
Теперь ваши установки должны годиться для дальнейшей настройки в воздухе.
Продвинутая настройка
Знакомство с воздействием P, I и D на характеристики
Р - это величина корректирующей силы, приложенной для того, чтобы вернуть мультикоптер в его начальное положение.
Величина силы пропорциональна общему отклонению от изначальной позиции минус любое командное воздействие на изменение направления с пульта управления.
Более высокое значение Р создаст более мощное усилие по сопротивлению любой попытке изменить положение мультикоптера. Если значение Р слишком велико, то при возврате в исходное положение возникает перерегулирование и, следовательно, требуется противоположная сила, чтобы компенсировать новое отклонение. Это порождает эффект раскачки до тех пор, пока наконец не будет достигнута стабильность или, в худшем случае, мультикоптер может стать полностью неуправляемым.
Увеличение значения Р:
- Приводит к большей устойчивости /стабильности до тех пор, пока слишком большое значение Р не приведет к колебаниям и потере контроля над мультикоптером.
- Вы заметите очень большую силу воздействия, противодействующую любому изменению положения мультикоптера.
Уменьшение значения Р:
- Приведет к дрейфу в управлении до тех пор, пока слишком малое значение Р не сделает мультикоптер неуправляемым.
- Коптер будет меньше сопротивляться любым попыткам изменить его положение.
Акробатические (пилотажные) полеты требуют чуть более высоких Р. а
Аккуратные и плавные полеты – чуть более низкого Р.
I – это период времени, в течение которого угловые отклонения записываются и усредняются.
Величина силы, прикладываемой для возврата в исходное положение, увеличивается на значения I настолько долго, насколько угловое отклонение сохраняется, пока не будет достигнута максимальная величина усилия. Более высокое значение I способствует улучшению курсовой устойчивости.
Увеличение значения I:
- Увеличит способность удерживать начальное положение и уменьшит дрейф, но так же увеличит задержку возврата в начальное положение.
- Также уменьшает влияние Р.
Уменьшение значения I:
- Улучшит реакцию на изменения, но увеличит дрейф и уменьшит способность удерживать положение.
- Так же увеличивает влияние Р.
Акробатический полёт: требует немного меньших значений I
Аккуратный плавный полёт: требует немного большие значения I
D – это скорость, с которой мультикоптер вернется в его начальное положение.
Увеличение значения D: (означает меньшее число, т.е. значение близкое к нулю) улучшает скорость, с которой отклонения восстанавливается.
- Увеличение значения D (помним, что это значит МЕНЬШЕЕ число, т.к. значение отрицательное) увеличивает скорость, с которой все отклонения будут скомпенсированы. Это означает так же увеличение вероятности появления перерегулирования и колебаний.
- Так же увеличивается эффект от изменения Р.
Уменьшение значения D: (это уже значит БОЛЬШОЕ число (дальше от нуля), т.к. это отрицательно значение)
- Уменьшает колебания при возврате в начальное положение.
- Возврат в начальное положение происходит медленнее.
- Так же уменьшает эффект от изменения Р.
Для акробатического полёта: увеличьте D (меньшее число, т.е. ближе к нулю)
Для аккуратного и плавного полёта: уменьшите D (большее число, т.е. дальше от нуля)
Продвинутая настройка – практическая реализация
Для акробатических полётов:
1) Увеличивайте значение Р до появления колебаний, затем немного уменьшите.
2) Изменяйте значение I до тех пор, пока дрейф по время зависания не станет недопустимым, затем слегка увеличьте.
3) Увеличьте значение D (меньшее значение – ближе к нулю) до тех пор, пока стабилизация после резких движений органами управления не будет приводить к недопустимой раскачке.
4) Сейчас можно немного уменьшить Р.
Для стабильных полётов:
1) Увеличивайте значение Р до появления колебаний, затем немного уменьшите.
2) Измените I пока коррекция после отклонения не станет недопустимо слабой, затем увеличьте немного.
3) Уменьшите D (дальше от нуля) до тех пор, пока стабилизация после резких движений органами управления не станет слишком медленной. Потом увеличьте D немного (меньшее значение).
4) Теперь можно немного уменьшить Р.
Другие факторы, которые влияют на PID
Знание оптимальных настроек PID для конфигурации, похожей на вашу, может помочь вам настроить свой мультикоптер, но имейте ввиду, что не бывает двух одинаковых мультикоптеров и следующие пункты будут непременно вносить влияние в фактические значения PID:
- рама - вес/размер/материал/жесткость;
- двигатели – мощность/крутящий момент;
- расположение двигателей и расстояние между ними;
- контроллеры двигателей и передатчик – кривые мощности;
- винты – диаметр/шаг/материал;
- балансировка;
- навыки пилота.
PID для автоуровня (Level или ACC)
Это будет влиять на полётные характеристики с акселерометром.
- P является доминирующей частью режима автоуровень.
- I сообщает сколько силы должно быть применено, когда измеренная угловая ошибка обнаружена.
- D используется для зажима максимального корректирующего усилия в режиме автоуровня.
Увеличение значения для P сделает режим автоуровня сильнее.
Для плавного управления сумма Р осей + Р уровня должна остаться около значения по умолчанию: если уменьшить P для осей крена и тангажа, то можно увеличить P автоуровня.
Перевод статьи сайта MultiWii: http://www.multiwii.com/wiki/index.php?title=PID
Мой канал:https://www.youtube.com/user/MrHobbyshop













Просто надо ставить родные драйвера
У автора статьи вижу опыт на стиках сравнимый с моим. Но таких крашей у меня не бывает (автор не успел переключить режим?). А помогает мне в этом волшебное автовыравнивание в горизонт (бросаю стик направления, регулирую газ первым стиком - коптер сам выравнивается). И краши на моем "съемочном" коптере случаются совсем по другим причинам (в основном улет из зоны РУ - пытаюсь летать FPV). И есть еще один коптер - сделан под 3D акробатику с регулями, прошитыми ресерсивной прошивкой и под рулением Мультивия. Вот его я бью очень часто.
Мое мнение - мультивий новичку проще понять для отрыва коптера от планеты. Но новичку на мультивие гораздо сложнее летать, чем на Мегапирате.
Если у новичка контроллер Ардупилот (или HKPilot) - то ему проще настроить и проще летать именно на Ардупилоте.
А грамотно настроить Мультивий, и хорошо на нем летать - новичок не сможет.
Такое моё IMHO.
Не хватает завершения- В очередной раз модель меня не устроила, и будет продаваться!
И еще, я наверное (как и многие другие) пропеллеры балансируем- зря!,пустое это!
сам собираю сейчас на такой раме и назе лайт жпс.
Такой вопрос: сколько по времени летает Ваша сборка?