В процессе постройки своего первого коптера решил совместить приятное с полезным - потренироваться на маленьких леталках и сделать сыну подарок. Выбор пал квадрокоптер на Syma X7, в основном по причине наличия и небольшой цены. Вот он.


Движки коптера коллекторные, с редуктором.

Сразу после покупки на шестерни и в место выхода валов мотора я капнул масла, сразу стали лучше крутиться. Масло притягивает пыль, поэтому на фотке редуктор порядком грязный.
Сразу всплыла проблема - поктер не может держаться на одном месте, его постоянно сносит в сторону, причем каждый раз по-разному. Ну что, надо разбирать, смотреть.

Переворачиваем, раскручиваем винты, видим аккум:

Неплохо для его размера, обеспечивает до 10 минут полета (если с перерывами). Аккум пришлось отдирать от корпуса - его прилепили на двухсторонний скотч.
Снимаем корпус, видим плату:

Видим 2 сдвоенных мосфета FDS9926, приемник-каплю и (внезапно) mpu6050.
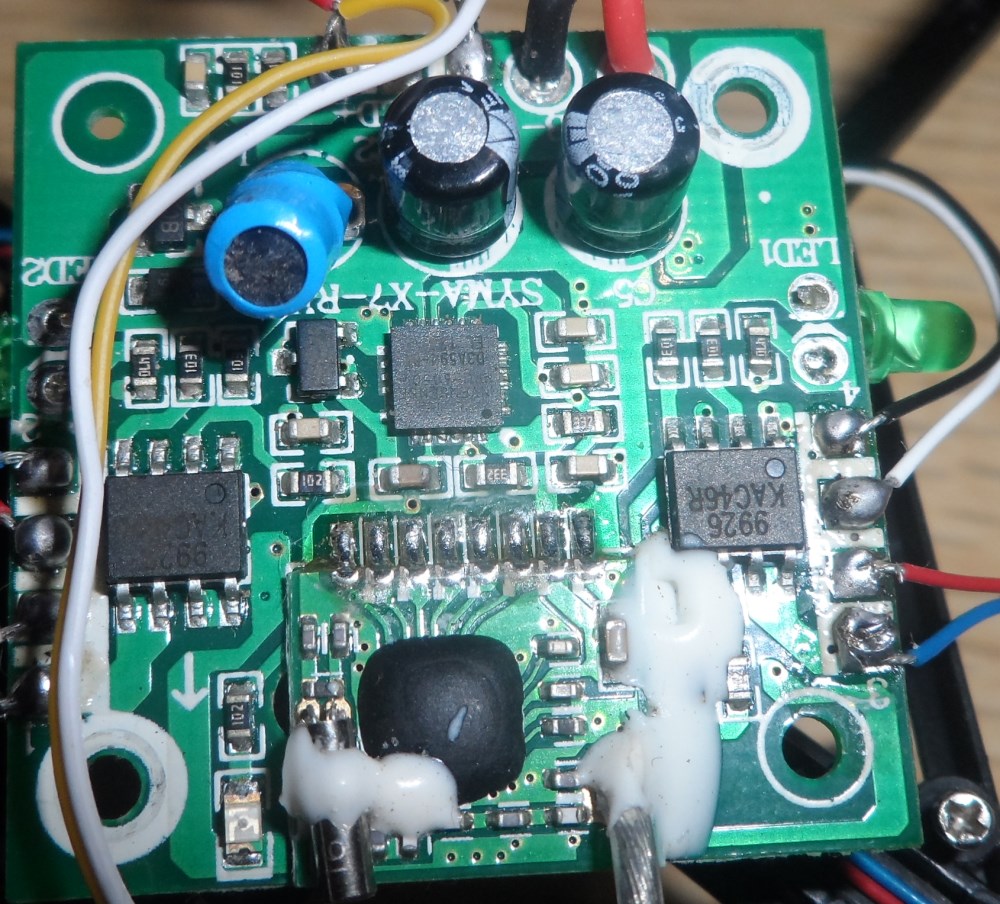
Это меня озадачило, ведь мпушка - довольно хороший девайс, уж стабилизацию должен обеспечить.
Разгадка крылась на нижней стороны платы.
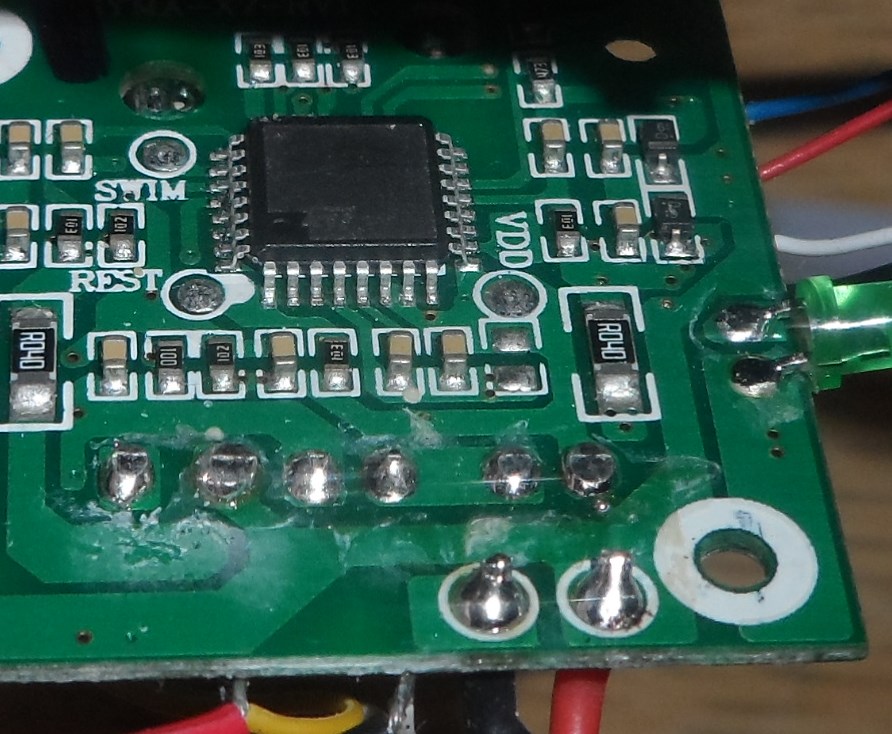
Производитель шибко удачно наклеил бумажку на проц, клей закрыл маркировку и не отдирается, но логотип ST виден, а подпись SWIM на одной из площадок говорит о том, что это проц семейства STM8. Вряд ли это топовый проц 8 семейства, а значит это примерно 1-2 кБ оперативки. Фильрацию в этом случае делать затруднительно, поэтому и "ползет" верх у коптера.
Проблему производитель решил хитро - при каждой резкой посадке гироскоп заново калибруется.
В обшем, вывод простой - это исключительно игрушка, причем она быстро надоест как раз из-за своей нестабильности.













При подключении батарейки сразу же коптер ставьте как можно ровнее и не трогайте коптер как минимум секунд 30 - идет калибровка гирика. Это простое правило даст вам стабильное и предсказуемое управление.
Я вообще стараюсь сначала коптер поставить, а потом уже цеплять акк. Как только подал питание - сразу же отпускаю коптер - пускай стоит калибруется. Это практически нигде не написано, но работает. Я это вычитал в какой-то ветке по какому-то китаелету на РЦДизайне.
Буду очень признателен.
------------
Просто убивает количество минусСаторов. Не нра - не жри. Пройди мимо.
На другой стороне только пассивные элементы.
" Ты кого больше хочешь, мальчика или девочку?
- Мальчика.
- А почему?
- Вертолёт хочу радиоуправляемый. "