
Вот краткий экскурс о будущем станке:
В статье расскажу как построить станок ЧПУ и как правильно настроить программу. Попутно будут разобраны проблемы, с которыми я столкнулся. Оговорюсь сразу, что для построения ЧПУ придется вложить денег, потребуется, по крайней мере 4 шаговых двгателя, контроллер управления шаговыми двигателями, меющий интерфейс для связи с ПК (LPT) порт, блок питания и некторые детали мебельной фурнитуры (направляющие), шпильки (подробнее об этом далее).
Контекст написания статьи был следующий. Я давно приследую цель наладить автоматические полеты, при этом занимался настройкой AR.Drone 2, на сайте опубликованы 2 статьи, достаточно успешно все получалось. После этого я собрал Bixler 2+APM. Скажу сразу, Bixler не оправдал моих ожиданий. Постоянные неустойчивые полеты, чувствительность к перегрузу. В итоге автоматику я испытал, но не сумел добиться устойчивых полетов. Не спорю, дело может быть в том, что неправильно было подобрано оборудование, но тем не менее я решил, что мне нужны такие самолеты, которые будут являться «расходным» материалом для моих экспериментов. Ну и, соответственно, я решил строить летающие крлья, как дешевые и простые. Быстро их сделать позволит мне пенорезка ЧПУ. Поэтому я и решил ее построить.
Основу для построения станка я нашел в инфо по следующей ссылке:http://www.keith-howlette.co.uk/hwc/cncfc.html. Станок представляет собой 2 стойки, на каждой по 2 шаговых двигателя (взаимно перпендикулярные оси X и Y). Между стойками растягивается струна. Шаговики управляются контроллером, который связан с ПК и получает команды с LPT порта.
Итак, перейдем к построению.
Нам понадобится:
1. 4 Шаговых двигателя.

Впринципе, их можно найти в сломанных принтерах и другой электронике. Я их заказал с сайта ebay. Они бывают разных типоразмеров (разный потребляемый ток, момент удержания и т д), вот например, ассортимент завода-изготовителя Ассортимент шаговых двигателей. Мои шаговики имеют 200 шагов на оборот, то есть на 1 шаг приходится 1,8 градуса.
2. Контроллер управления шаговыми двигателями.
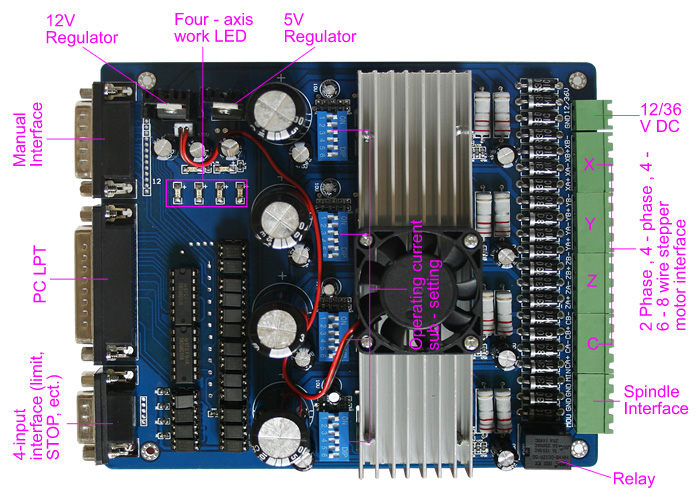
Коротко расскажу о нем. Простейшие двигатели, которые имеют 2 вывода легко подключать: подал на них питание и они вращаются. Шаговые двигатели, как правило имеют большее количество выводов и управлять простой подачей напряжения на них не получится. Ими управляют подачей специальных импульсов, вырабатывают которые контроллеры. Контроллеров существует куча. Вообще их можно сделат самому. Задача контроллера – подавать специальной формы импульсы на шаговый двигатель. В нашем станке 4 двигателя, а значит нам нужен 4 осевой контроллер. Я заказал китайский на ebay, в основе которого микросхема управления шаговыми двигателями. Таких контроллеров существует довольно много – «синяя плата», «красная плата», подробнее можно почитать на сайтах ЧПУшников. В основе этих плат микросхемы Toshiba, просто китайцы развели плату, обвязали внешними компонентами и сделали ее удобной для подключения и использования.
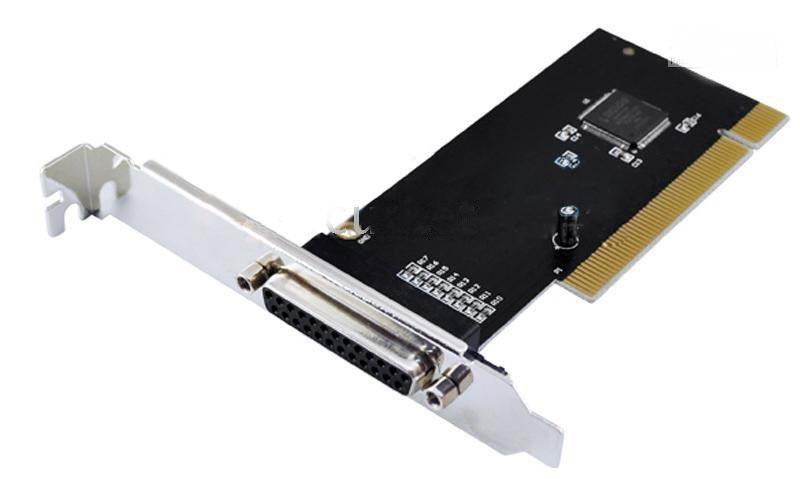
3. Компьютер, который имеет LPT порт. Я нашел у своих знакомых старый системник, взял его за основу. А вообще по объявлениям можно найти дешевые системники. Скажу сразу, что переходники типа USB->LPT проверял, но они не работали. На моем системнике отсутствовал LPT порт, но я вышел из ситуации заказав на ebay вот такую платку которая вставляется в материнскую плату (на плате всего одна микросхемка и несколько конденсаторов и резисторов):
Монитор, клава, мышка – обязательно!
4. Шпильки длиной 1 метр с резьбой М6 – 4 штуки:

Шпильки вращает шаговый двигатель.
к шпилькам гайки удлиненные – 4 штуки:

При вращении шпилек гайки двигаются, вместе с ними двигаются по направлящим и элементы станка.
Направляющие роликовые длиной 55 см (которые, как оказалось не легко достать) – 8 штук.

Вот ссылка на производителя: http://www.boyard.biz/catalog/slide_systems/db/db4503zn_550.html. Я брал самые длинные - 55 см.
5. Блок питания для шаговых двигателей. Пойдет любой, главное чтобы напряжение и ток он выдавал такой, какой требуют шаговики в их спецификации. Я использовал лабораторный DAZHENG 3005.
6. Шурупы, провода, плиты ДСП, шланг резиновый диаметр внутренний 5 мм, хомуты, кольцевая пила.
7. Из иструмента: дрель со сверлами, паяльник, отвертки, плоскогубцы, лобзик ручной электрический.
Изначально нам нужно выпилить из ДСП все элементы нашего станка. Здесь я указал размеры деталей (все примитивно, от руки): Чертеж станины. ДСП найти можно где угодно, это плиты от ненужной мебели. Рзмечаем тонким маркером - и вперед с помощью электролобзика все легко пилится. Более мелкие предметы можно выпилить ножевкой по металлу. Круглые отверстия под шаговик выпиливаем колцевой пилой.
Из полученных деталей начинаем собирать стойки будущего станка. На рисунке я привел размеры и расстояния, куда должны крепиться направляющие. После сборки стоек, нам нужно прикинуть, где и как будет установлен шаговик, где пройдут винты. Работа эта творческая, думаю каждый с ней справится. И вообще, размеры станка, которые я привел, могут не обязательно быт такими. Каждый может построит станок с другими размерами, в зависимости от желания и наличия его составляющих.
Если возникают вопросы, ориентируйтесь на фотографии с иностранного сайта. Отверстия под iшпильки нужно просверлить. А вот крепление гаек к подвижным элементам - это творчество. Я не нашел удобных креплений, поэтому тупо забил эти гайки в просверленные отверстия в небольших досках, намазал эпоксидкой и прикрутил к станку.
Ну все: станок построен, осталось немного удлинить провода, чтобы хватало до контроллера+необходимый запас, т.к. станок по Х 55 см+ вверх по Y 55 см может отъехать.
Переходим к настройке ПО и железа.
Когда к нам пришел контроллер, мы можем его проверить. Для работы нашего станка нам потребуется программа Mach3. Где ее искать, я не буду говорить, ведь это все итак знают. Устанавливаем, добиваемся полного функционала.
Подключаем LPT кабель к компу (комп должен быть отключен!) и к контроллеру (который тоже должен быт отключен). Если у вас самодельный контроллер или другой отличный от моего, то нужно курить форумы и искать, как к нему подцеплять LPT. Включаем комп и подаем питание на контроллер. Далее заходим в Mach3. Начинается настройка. Подробное описание настройки http://wiki.purelogic.ru/index.php?title=Базовая_настройка_MACH3. Не вижу смысла его переписывать. Если будут вопросы, то отвечу с удовольствием и помогу настроить. Теперь можно покрутить движками. После настройки нажимаем Reset, заходим в Motor tuning, нажимаем например, на ось X, потом на клавиши стрелок вверх идли вниз, двигло должно вращаться.
Не будет лишним прочитать инструкцию по настройке Mach3 на русском языке, например вот эту http://cnc-aht.ru/download/config/Mach3Mill_Install_Rus_v.pdf. Также к любому контроллеру ШД должно идти описание, чтобы мы могли в Mach3 забить какие пины за что отвечают.
Замечание. У меня была проблема такая, что платку, которую я установил в материнку (плата LPT порта) имела другой адрес, который нужно указывать в Mach3. Адрес LPT порта можно вычислить, прочитав инфо в этой статье http://repitorix.narod.ru/lpt_scaner.html. После этого некоторые мои движки отказывались нормально вращатся. Я увелиил время импульса в Motor Tuning, движки начали крутиться, но очень не устойчиво. Я начал искать причину и выяснил, что сигналы, которые подает платка LPT на контроллер не прямоугольные (каковые должны быть), а сглаженные! То есть наши друзья китайцы напаяли к этим пинам конденсаторы. Тут я решил, что эти пины надо пустить не на импульсы шагов, а, например, на импулсы вперед/назад. Одним словом, я поменял в кабеле местами контакты и поменял их в проге. Не охота загружать читателя. Если подобная проблема возникнет, решение есть.
Итак мы настроили движки, теперь можно вырезать. Прикупим себе спираль для старых плиток:

Вещь супердешевая. Диаметр около 0,8-1 мм.
Стойки (станины) станка установим параллельно, разнесем их на расстояние ( я разнес на 1 м), прикрутим к фундаменту (например, к столу). На подвижные элементы станка прикручиваем шурупы, на них - пружинки на растяжение, на пружинки спиральку (смотри видео вначале). Подводим с двух сторон напряжение к этим шурупчиком. Подводящие провода берем с запасом. Напряжение для резания, которое подается на струну, выбирается эмпирически. Оно зависит от скорости резания, типа спирали и т.д. Я на спираль подаю 12 В от блока питания компьютера, на котором у меня установлен Mach3 (желтый и черный провода).
Для управления движками Mach3 использует для G-код. Это фактически текст, в котором указано, в какое время и сколько нужно переместиться для каждой оси, чтобы вырезать нужный объект.
Наша последовательность будет следующей: мы будем проектировать наш объект или брать готовое (в программе Profili 2 мы будем задават необходимые параметры, она нам будет формировать G-код!). Этот код мы открываем в Mach3 и станок нам вырезает. По поводу формирования G-кода можно почитать в нете,но, я думаю, это лучше выделить в отдельную статью.
Вот видяшка работы моего станка:
Извиняйте за непонятки, статью сформировал за ограниченное число часов.
Всего не напишешь, непонятные моменты лучше уточнить в комментариях.













Я с Вами согласен. Я давно читал и видел Вашу статью.
Ручные пенорезы уходят в небытие. В скором времни мы начем здесь обмениваться G-кодами.
Шпильки не самый лучший вариант. Про точность скажу Вам - на этом станке она довольно высока (я вырезаю +/- 2мм, даже +/-1мм). А по поводу хорошей точной станины - это по требованию. на сегодняшний день Ebay предлагает большой выбор направляющих и других элементов самосборного станка. Мне пока этого не нужно, ведь текущая точность меня вполне устраивает.
Есть желание собрать кухонный фрезер с точностью реза 0,1-0,2мм. Притом сделать это с минимальными затратами. А иначе смысла нет. Торговать китами нарезки я не собираюсь,да и лобзиком пилить в отличие от нынешних лентяев умею и не считаю зазорным.
ЗЫ добавлю,что скорость будет зависеть не от материала и чистоты поверхности винта,а от качества фрезера,самих фрез и фрезеруемого материала.
В любом случае желаю удачи, получите свой бесценный опыт.
Дополню: ничего не нужно читать. Нужно просто понимать, что такое косвенные измерения и как формируется погрешность косвенных измерений.
Видел я много раз как многие умельцы, измеряют, например ток и напряжение с точностью до десятой, скажем 1,1 А и 5,3 В. применяя метод амперметра и вольтметра получают искомое сопротивление 4,8181818181818181818181818181818! С точностью аж до 31 знака!
Тяжело объяснять людям это. С калькулятором в их руках не поспоришь!
Максим,фанера вполне себе надежный материал,не в пример опилочным и фракционным плитам. Гайки с рынка никто применять и не собирается. для этого есть бронза или капролон. Правда придется токарей искать.
Ну а если делать по "взрослому" и все покупать,то цена будет сопоставима с готовым изделием. Попробуйте собрать автомобиль по запчастям на рынке или в автомагазине,а затем сравните цену с новым из автосалона. Какая разница будет,думаю,догадываетесь.
струна очень толстая - даётся поправка на подплавление программой?
Этот станок умеет резать крылья в форме трапеций (например для летающих крыльев). Постараюсь написать это в скором будущем в другой статье. Там работа с другой программой.
походу опять копипаста,потому что без конкретики и галопом по европам. Одного не пойму зачем пену на чпу резать? Только лишь с целью серийного производства. А вот бальзу,фанерку,тонкий текстолит было бы неплохо.
Давайте механику лучше на суд зрителям представьте и желательно бюджетную.
А шаговики и контроллеры для них тут уже предлагали в многосерийном варианте,но видимо автор на дальнейших действиях неожиданно сошел с дистанции.
Да и поведайте нам в какую сторону пространства смотрит ЧЕТВЕРТАЯ ось??? Очень интересно,вдруг вы пространство пронизывать по диагонали научились.
Я не привык отвечать на различного рода придирки.
Если общаться - то как инженеры: по существу. Тем не менее Я отвечу Вам.
1. По поводу копипасты - Вам виднее.
2. По поводу суда для зрителей - читатели сами обратятся с вопросами. Если Вас интересует механика, то здесь она в минимуме: все можно увидеть на фотках - это механическая передача винт-гайка.
3. Четырех осевой - на каждой станине существует 2 оси. В программе Mach3 предусмотрено 6 осей.
Отступление: По поводу пространства. Наше пространство Евклидово и в нем есть 3 ортогональные оси. Но я не ставлю себе целью построить станок со ВСЕМИ осями ортогональными. Если Вам известно из Векторной алгебры и Аналитической геометрии, то существует бесконечное количество осей. Вопрос только в их линейной зависимости и независимости.
во первых это не придирки,да и вы не партизан на допросе. Если вы выкладываете статью,то она должна быть полной и понятной. А не выборкой красивых фраз и терминов.
Что касаемо осей,то я вижу четыре направляющих и ве оси(горизонтальная и вертикальная)
Если все заказывать(в том числе и распил дсп),то проще купить готовый станок. И мороки меньше и стоить будет не намного дороже.
Так же хочу заметить что ДСП для подобных целей материал никудышний. Если уж и делать деревянную конструкцию,то из фанеры.
Далее ни вижу ни буквы о том,как крепить шпильки к валам шаговиков.
на фото там ничего не разобрать,а видеоинструкции я не любитель смотреть,особенно с моим пещерным интернетом.
возвращаясь опять же к станку,так было в сети очень хорошее описание(по моему от немцев) вертикальной чпу пенорезки без движущихся порталов вообще.
у меня нет станка,поэтому я не занимался изучением софта. Это то же самое,как и обучение плаванью на берегу. Поэтому об ущербности судить не могу.
И еще в начале обсуждения задавал вопрос зачем чпу для резки пены струной? Это легко и просто делается и без чпу. Совсем другое дело фрезер по деревяшкам. Пазлы для бензиныча,к примеру, ручным лобзиком будет выпиливать не только утомительно,но и местами невозможно,тк фанера при распиловке даже лобзиком любит скалываться.
Меньше пыли, но больше дыма ...
Везде свои прелести.
Иван,фреза 0,6-0,8мм будет на порядок меньше колоть и лохматить. И если с пылью в домашних условиях можно смириться и легко бороться,то дым не доставит радости ни домочадцам,ни соседям.
У лазера тоже есть свои недостатки кроме дыма. Это и высокая цена для личного использования и необходимость зачистки обугленых кромок.