Радиоуправляемые модели самолетов, вертолетов, автомобилей, катеров, яхт и танков.
Гарантируем ваше удовольствие либо возврат денег. На сайте огромное количество отзывов о нашей работе и товарах.
MultiWii 328P Контроллер мультикоптера с поддержкой FTDI и DSM2
Мы сохраняем такие товары, чтобы дать возможность Вам получать информацию из накопленных комментариев и отзывов.
.jpg)
.jpg)

.jpg)








-
MultiWii 328P представляет собой контроллер мультикоптера с базовой инерциально-навигационной системой, который может быть запрограммирован соответственно вашим требованиям. Эта версия MultiWii контроллера имеет поддержку совместимых сателитных приемников DSM2*. С расширенными возможностями и возможностью полного программирования, это устройство может контролировать любой тип самолета. Это идеальный контроллер полета для ваших многороторных авиамоделей.
* DSM2 - протокол связи между приемником и передатчиком 2.4ГГц, отличающийся высокой надежностью.
Особенности:
• SMD дизайн на основе контроллера Atmega328P
• ITG3205 Трехосевой гироскоп
• BMA180 Акселерометр
• BMP085 Барометр
• HMC5883L Магнетометр
• Выход для сервомашинок управления поворотом камеры
• Раздельное стабилизированное питание 3.3В для датчиков
• Бортовой конвертер логических уровней
Характеристики:
Размеры: 50x50x12mm
Монтаж: Стандартный стиль МК монтажных отверстий 45мм х 45мм
Вес: 13.9г
Комплектация:
MultiWii 328p FC x 1Файлы (если более недоступны, то искать на соотвествующей страничке в разделе "Files" на сайте поставщика)
Описание разъемов
Больше информации можно найти на сайте Multiwii.
http://www.multiwii.com
-
The MultiWii 328P is a gyro/accelerometer based flight controller that is loaded with features. This version of the MultiWii supports DSM2 compatible satellite receiver functionality. With expandability options and full programmability, this device can control just about any type of aircraft. This is the ideal flight controller for your multi-rotor aircraft.
Features:
• SMD component design with Atmega328P
• ITG3205 Triple Axis Gyro
• BMA180 Accelerometer
• BMP085 Barometer
• HMC5883L Magnetometer
• Servo output for camera pitch and roll control
• Separate 3.3v regulated power supply for the sensors
• On board logic level converter
Specs:
Dimensions 50x50x12mm
Mounting: Standard Mk style mounting holes 45mm X 45mm
Weight: 13.9g
Package content:
MultiWii 328p FC x 1
More information can be found on the Multiwii Website.
http://www.multiwii.comNote: When flashing the MCU with new firmware please remove any connection from AUX2.
Упоминается в статьях и вопросах
 Квадрокоптер на основе MultiWii 328P 148
Квадрокоптер на основе MultiWii 328P 14825 января 2014 года в 23:47 | Сергей Романенко Борзна
 Статья http://www.parkflyer.ru/blogs/view_entry/3876/
Статья http://www.parkflyer.ru/blogs/view_entry/3876/  Квадракоптер своими руками с нуля84
Квадракоптер своими руками с нуля847 апреля 2013 года в 17:03 | Глеб Орлов Москва
Статья http://www.parkflyer.ru/blogs/view_entry/1074/ 4 февраля 2014 года в 15:23 | Денис Тихомиров Москва
Статья http://www.parkflyer.ru/blogs/view_entry/3982/ Квадрокоптер на основе MultiWii 328P 14825 января 2014 года в 23:47 | Сергей Романенко Борзна
Статья http://www.parkflyer.ru/blogs/view_entry/3876/ Квадракоптер своими руками с нуля847 апреля 2013 года в 17:03 | Глеб Орлов Москва
Статья http://www.parkflyer.ru/blogs/view_entry/1074/ 4 февраля 2014 года в 15:23 | Денис Тихомиров Москва
Статья http://www.parkflyer.ru/blogs/view_entry/3982/  Первый квадрокоптер или как не наступить на грабли.Часть 1 (подбор комплектующих)36
Первый квадрокоптер или как не наступить на грабли.Часть 1 (подбор комплектующих)3613 августа 2013 года в 03:17 | Лион Батырев Брест
Статья http://www.parkflyer.ru/blogs/view_entry/2064/ 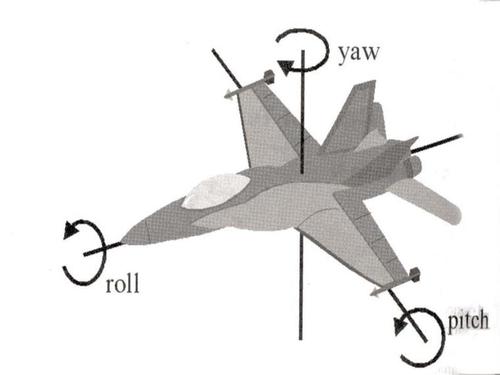 Микроконтроллеры в управлении летательными аппаратами. Определение горизонта. Комплементарный фильтр.30
Микроконтроллеры в управлении летательными аппаратами. Определение горизонта. Комплементарный фильтр.3015 мая 2013 года в 17:26 | Александр Зайчиков Москва
Статья http://www.parkflyer.ru/blogs/view_entry/1461/  Первый мультикоптер.3
Первый мультикоптер.322 апреля 2015 года в 13:59 | Тимур Кушикбаев
Вопрос http://www.parkflyer.ru/blogs/view_entry/11347/ 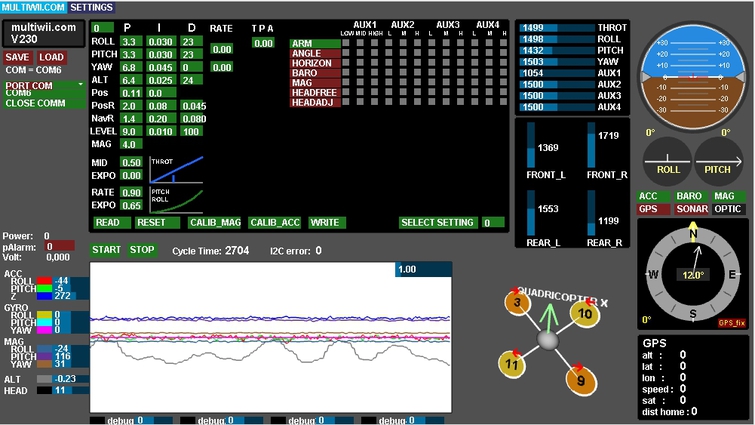 Выбор платы(платформы) Arduino0
Выбор платы(платформы) Arduino029 января 2015 года в 23:28 | Д Ж Нижний Новгород
Вопрос http://www.parkflyer.ru/blogs/view_entry/10570/ 













Чтобы общаться и совершать покупки необходимо зарегистрироваться.
Это просто и займёт всего одну минуту.
Спасибо за регистрацию!
Для подробностей, наведите курсор на одну из картинок.
| Удаленные товары | |||||||
| Очистить | |||||||
/* individual sensor orientation */
//#define ACC_ORIENTATION(X, Y, Z) accADC[ROLL] = Y; accADC[PITCH] = -X; accADC[YAW] = Z;
//#define GYRO_ORIENTATION(X, Y, Z) gyroADC[ROLL] = -Y; gyroADC[PITCH] = X; gyroADC[YAW] = Z;
//#define MAG_ORIENTATION(X, Y, Z) magADC[ROLL] = X; magADC[PITCH] = Y; magADC[YAW] = Z;
потому как квадрик ведёт себя непонятно как...посмотрел на ГУИ при добавлении газа неравномерно происходит увеличение показаний на моторах один явно опережает остальные....может из-за настройки осей? или где тогда?
В прошивке 2.2 выбрать
Для нашей платы
#define HK_MultiWii_328P // Also labeled "Hobbybro" on the back. ITG3205 + BMA180 + BMP085 + NMC5583L + DSM2 Connector (Spektrum Satellite)
и все, датчики что идут дальше раскоментировать не нужно.
так как я в написании и исходниках по большей части нуб, не знаю куда рыть.
в конфиге раскоментил только две строки
#define quadx
#define HK_MultiWii_328P
Заранее благодарю!
http://www.parkflyer.ru/105295/blogs/view_entry/10901/#position=385228
???
#define HK_MultiWii_328P // Also labeled "Hobbybro" on the back. ITG3205 + BMA180 + BMP085 + NMC5583L + DSM2 Connector (Spektrum Satellite)
Далее поключаем к GUI и все каналы управления тримерами подгоняем к 1500
Выставляем стики ровно по центру в том числе и газ и тримерами подгоняем значения на 1500.
После чего отклоняем стики в разные стороны и смотрим чтобы значение не были меньше 1000 и больше 2000 в крайних положениях.
После чего не подключая силовой аккумулятор, газ в минимум и вправо до упора на несколько секунд (Армим)
В гуи ARM должен стать зеленого цвета, газ вниз и влево до упора на несколько секунд (Дизарм)
Если так то при подключении силового аккумулятора при арме движки должны запуститься.
Если не так, то какие регуляторы используются ?