Появился у меня этот чудо автопилот и спустя около трех месяцев я понял что надо срочно делать инструкцию для чайников, понял потому как вопросы лезут как червяки
.b1cb02c65ca3b962e5a4a83e73131de0.prev.jpg)
Про свои впечатления говорить не буду так как сказано уже многое, скажу одно, что цена качество супер и пока я не нахожу ничего что бы меня разочаровала, напротив открываю всё новые возможности этого чуда
.b1cb02c65ca3b962e5a4a83e73131de0.jpg)
И так приступим, наш аппарат уже собран осталось настроить для этого нам понадобится программа мишень планер (вот он последняя версия ) компьютер и немного терпения и внимательности
Ообязательная настройка:
дополнительная настройка:
бонус демонстрация управления с наземки-компьютера (ОПАСНО МАТЕРКИ):
Хочется ещё сделать описание программы мишень планер(разобрался уже на 95%) ТК очень там много всего и режимов куча и настроек как до сниму выложу сюда же!
смотрим логи чёрный ящик и логи телеметрии в самом конце
подробно о подключении регуляторов и вращении моторов
Конденсатор ставить, нет?
тут есть настройки для разных пультов в списке больее 10 разных http://copter.ardupilot.com/wiki/common-six-modes/
подключение моторов http://copter.ardupilot.com/wiki/connecting-your-rc-input-and-motors/
о мишенпланере
проверить калибровку акселерометра: подключится к мишенпланеру подождать пока барометр покажет высоту без сильных скачков (буквально секунд 20-30) далее глядя на высоту наклонять аппарат в разные стороны высота не должна менятся
включите логи (default+IMU) как показанно тут: http://copter.ardupilot.com/wiki/downloading-and-analyzing-data-logs-in-mission-planner/ чтоб после первого вылета проверить какая вибрация ну и просто чтоб если вдруг авария узнать что было
ТУТ ОБНОВЛЯЕМАЯ ВСЕГДА САМАЯ НОВАЯ ИНСТРУКЦИЯ но на вражеском языке :
http://copter.ardupilot.com/wiki/introduction/
продолжение тут http://www.parkflyer.ru/55835/blogs/view_entry/4252/
Соблюдайте технику безопасности снимайте пропеллеры при настройке!
Решил что писать очень долго и много по этому снял видео: (забыл сказать после прошивки нужно сделать ресет, делается в окне терминал, там конект, начинаем печатать: setup, reset, просит нажать Y после просит перезагрузить надо нажать кнопку на плате) после можно настраивать
Ообязательная настройка:
дополнительная настройка:
бонус демонстрация управления с наземки-компьютера (ОПАСНО МАТЕРКИ):
Хочется ещё сделать описание программы мишень планер(разобрался уже на 95%) ТК очень там много всего и режимов куча и настроек как до сниму выложу сюда же!
PS: я не претендую на + просто хочется помочь людям в освоении этой мега платы ТК вещь очень стоящая
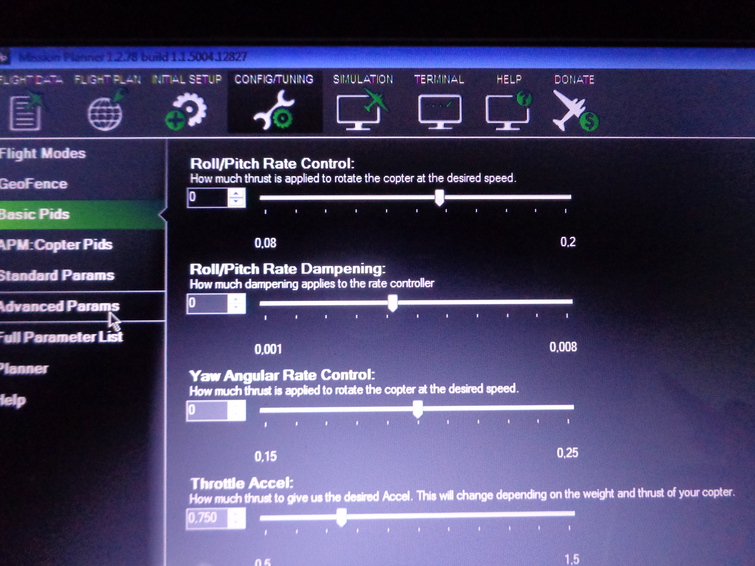
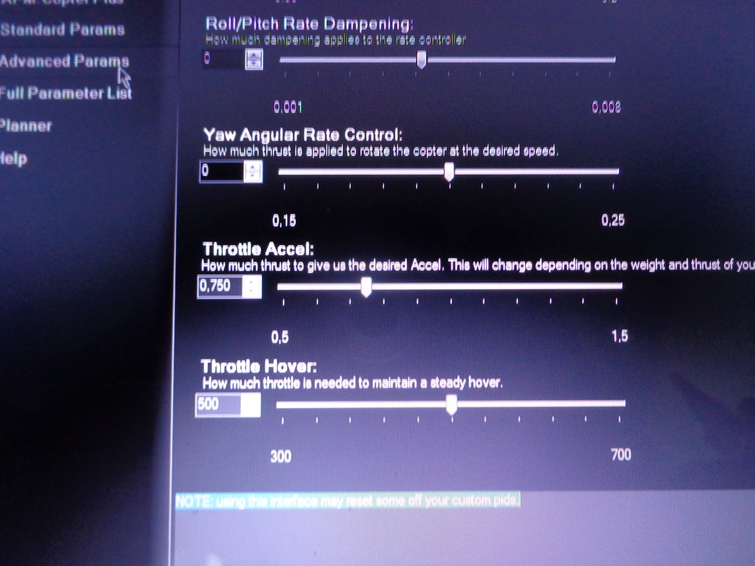
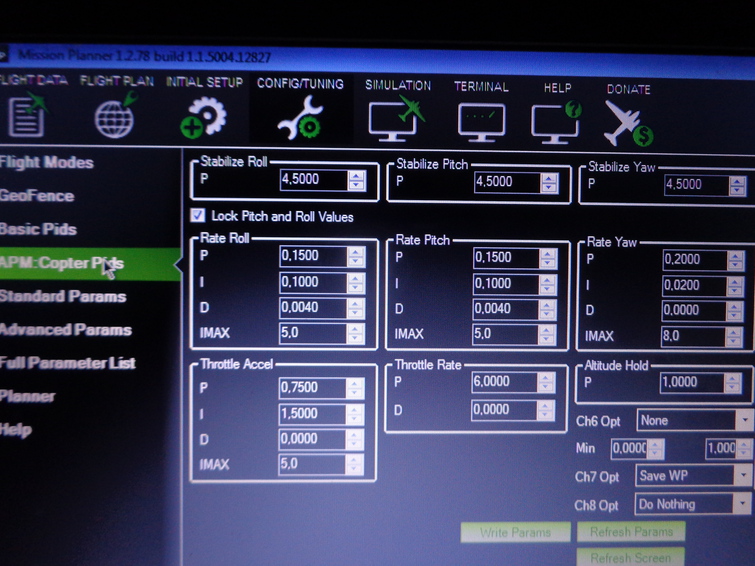
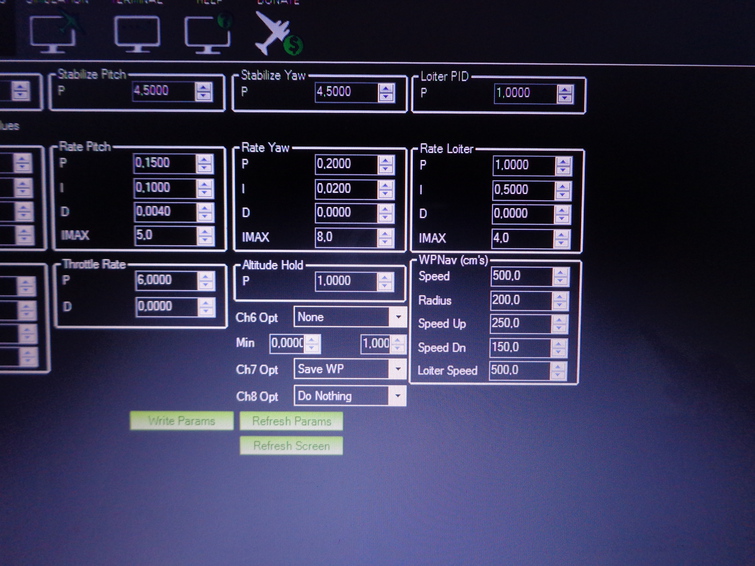
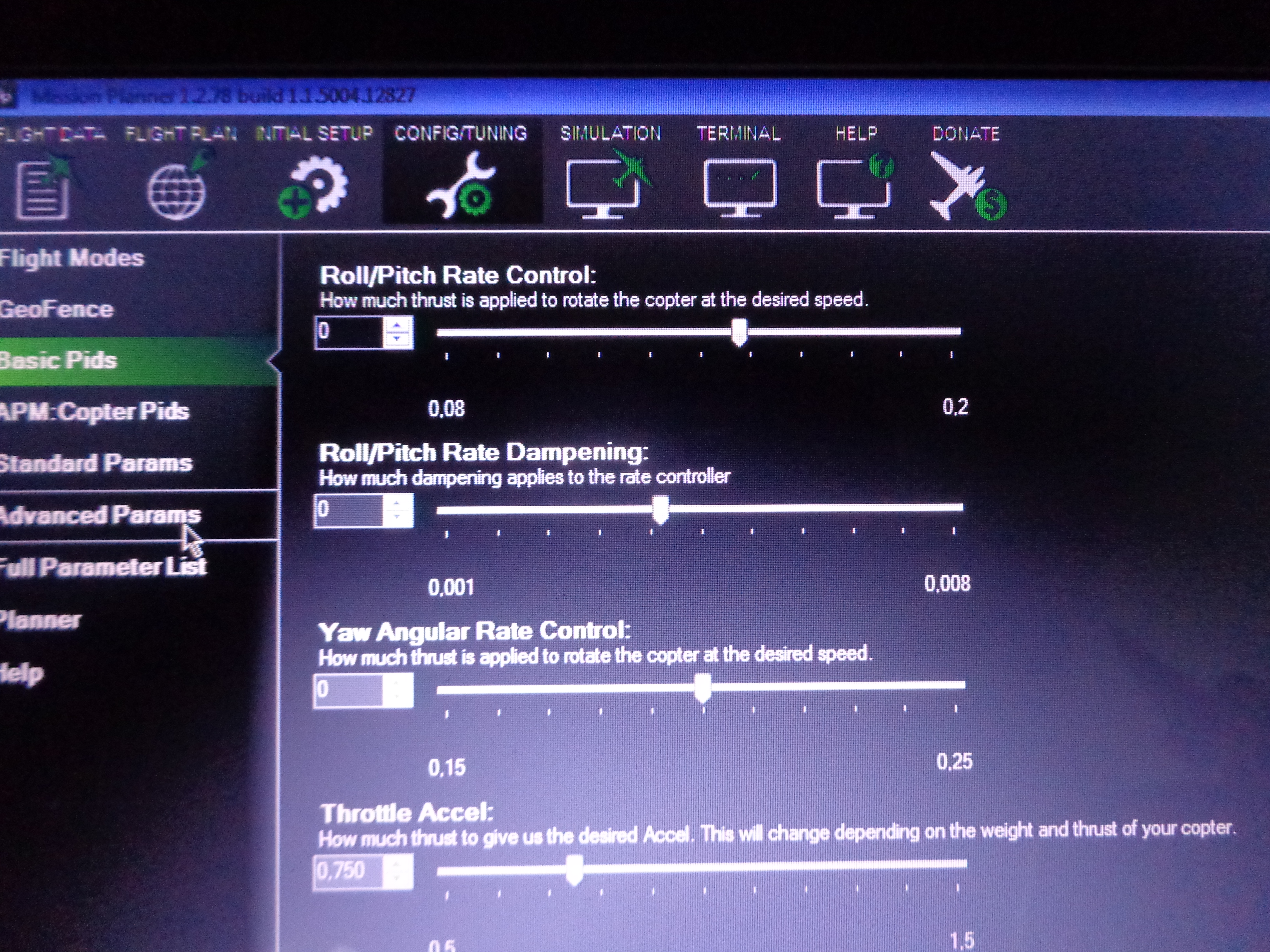
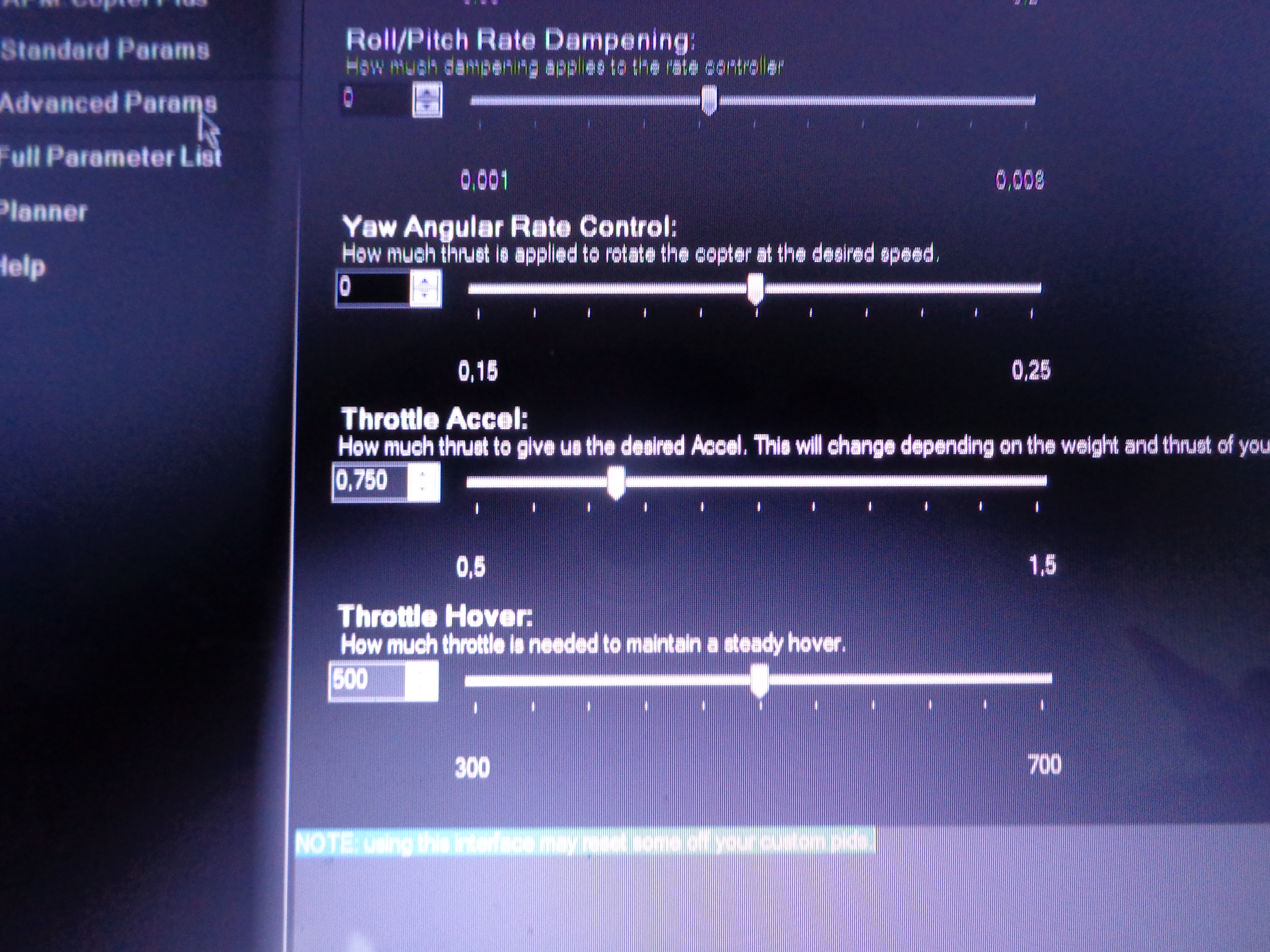
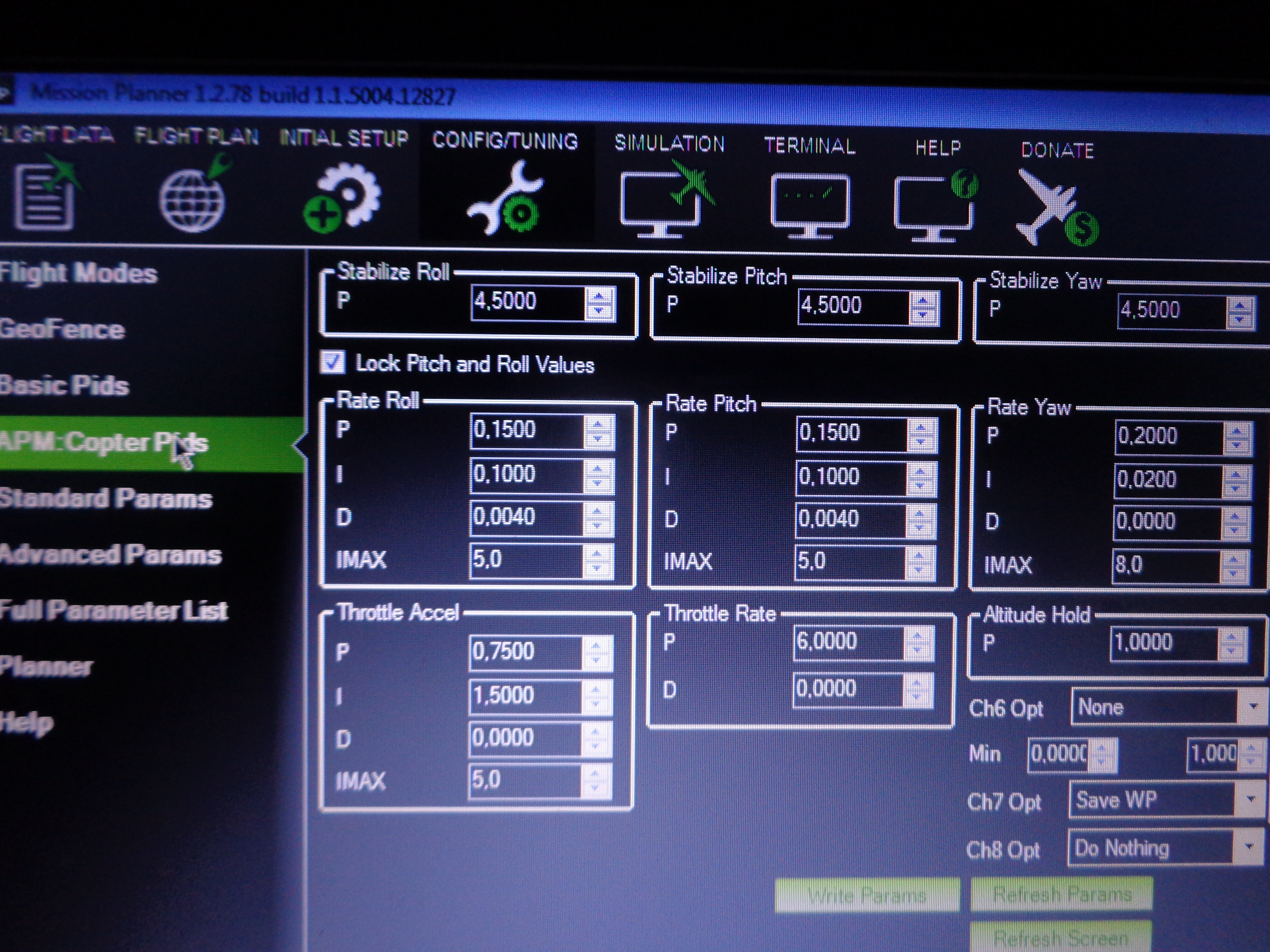
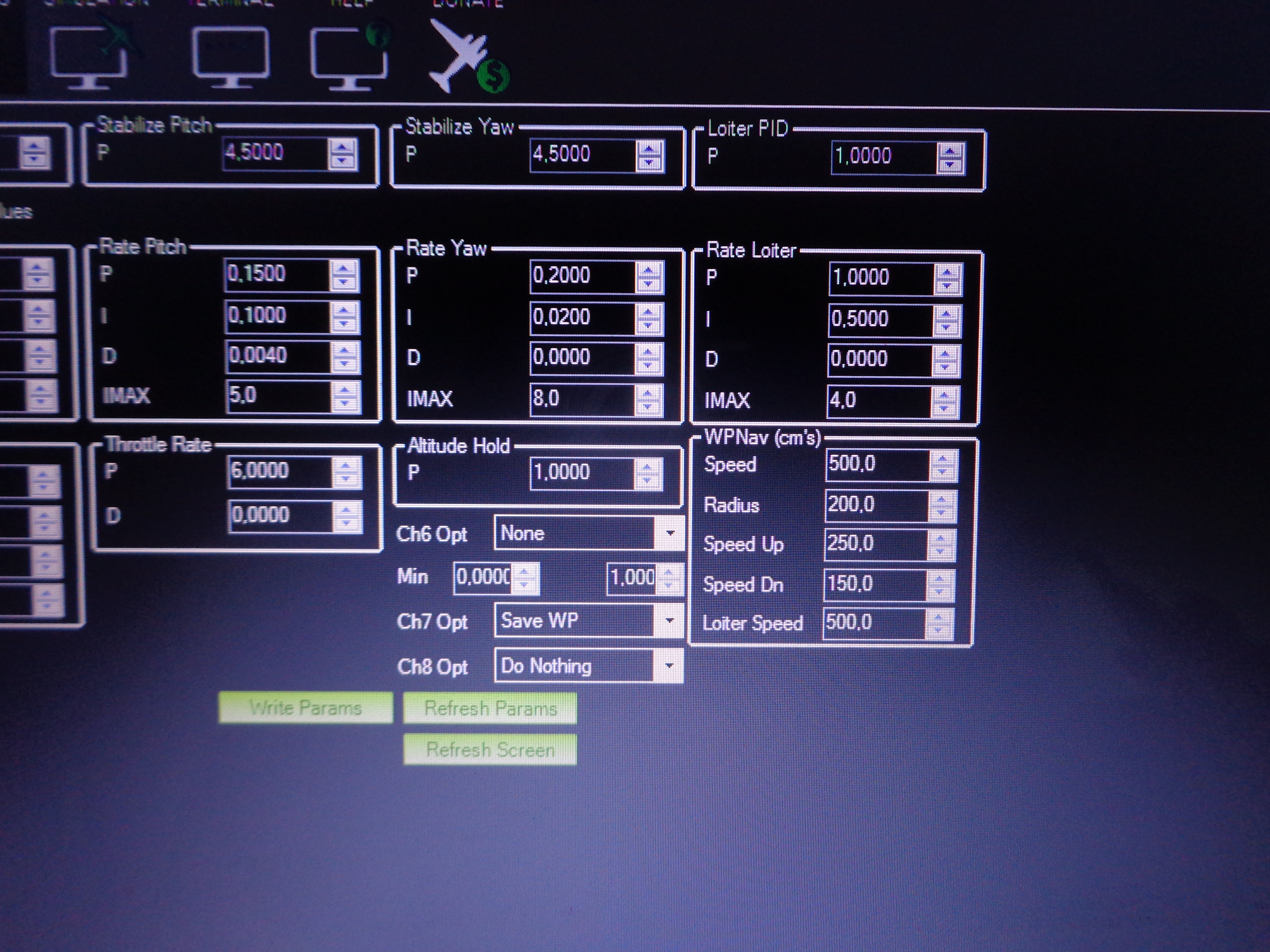
просятся фото дефолтных настроек вот они:
смотрим логи чёрный ящик и логи телеметрии в самом конце
подробно о подключении регуляторов и вращении моторов
Конденсатор ставить, нет?
тут есть настройки для разных пультов в списке больее 10 разных http://copter.ardupilot.com/wiki/common-six-modes/
подключение моторов http://copter.ardupilot.com/wiki/connecting-your-rc-input-and-motors/
о мишенпланере
проверить калибровку акселерометра: подключится к мишенпланеру подождать пока барометр покажет высоту без сильных скачков (буквально секунд 20-30) далее глядя на высоту наклонять аппарат в разные стороны высота не должна менятся
включите логи (default+IMU) как показанно тут: http://copter.ardupilot.com/wiki/downloading-and-analyzing-data-logs-in-mission-planner/ чтоб после первого вылета проверить какая вибрация ну и просто чтоб если вдруг авария узнать что было
ТУТ ОБНОВЛЯЕМАЯ ВСЕГДА САМАЯ НОВАЯ ИНСТРУКЦИЯ но на вражеском языке :
http://copter.ardupilot.com/wiki/introduction/
продолжение тут http://www.parkflyer.ru/55835/blogs/view_entry/4252/













пиды настраивать в коптер пид!
авто триммирование сделай обязательно прежде чем к пидам лезть (мб всё и так нормуль)
Ничего страшного в этом нет, когда рзберешся. басик пид напрямуб связан с коптер пид. Они как крутилки чувствительности.
Сегодня в ветер летал и никаких бесполезных раскачиваний!
Юра привет. На счет Basic pids хочу сказать, что не катят твои настройки на моем аппарате. После того как я выставил их он начал капризничать очень сильно. Пришлось регулировать заново, вывод - они индивидуальны повидимому.
Если можешь - переведи грамотно какая строка за какое положение отвечает. Очень нужно.
Еще один вопросик, что отвечает за рудер? Раньше до сброса настроек квадрик держал позицию как прибитый, а теперь он очень медленно пытается врачаться. А при развороте особенно если ручку до упора влево или вправо а потом бросаешь (она выравнивается) квадрик аж подпрыгивает сантимов на 30. Может компас или акселирометры не верно откалиброваны?
Еще один вопросик при калибровке аксилеромитров последнее положение квадрика - вверх ногами (так перевел - может не верно)?
Самое первая строка - при калибровке аксилеромитров- не понятно в каком он должен быть положении?
В функционале имеется стабилизация камеры - т.е квадрик может ветром колбасить а камера должна держать позицию. Вопрос куда подключать сервы на плате?
Юра, а у тебя нет схемы, вообще что и куда подключать?
Да и датчик тока, есть версии куда подключать. Заказал себе тоже телеметрию на 915 как прийдет вопросов думаю прибавится.
Р – это основополагающая часть ПИД-регулятора которая является залогом хороших летных характеристик. для начала настраивается, да и обычно других( л, д) настроек не требуется
берём за пузо коптер и постепенно прибавляйте газ, стараясь найти точку висения. Вы почувствуете уменьшение веса коптера
попробуйте наклонить вниз коптер вдоль направления каждой из осей моторов. Вы должны почувствовать реакцию, направленную на компенсирование вашего давления вдоль оси (вы давите вниз, ПИД регулятор увеличивает обороты двигателя, пытаясь поднять этот край, тем самым противодействуя вашему усилию
дальше начинайте раскачивать мультикоптер, увеличивайте Р до тех пор, когда начнутся осцилляции (самораскачка) и затем немного уменьшите.
Теперь ваши установки должны годиться для дальнейшей настройки в воздухе
Более высокое значение Р создаст более мощное усилие по сопротивлению любой попытке изменить положение коптера. Однако если значение Р слишком велико, то при возврате в исходное положение возникает перерегулирование и, следовательно, требуется противоположная сила, чтобы компенсировать новое отклонение. Это порождает эффект раскачки до тех пор, пока наконец не будет достигнута стабильность или, в худшем случае, коптер может стать полностью неуправляемым.
Увеличение значения Р:
приводит к большей устойчивости /стабильности до тех пор, пока слишком большое значение Р не приведет к осцилляциям и потере контроля над коптером (потере управления). Вы заметите очень большую силу воздействия, противодействующую любому изменению положения коптера.
Уменьшение значения Р:
приведет к дрейфу в управлении. Если Р слишком мал, коптер становится очень нестабильным. Коптер будет меньше сопротивляться любым попыткам изменить его положение.
Акро (полеты на пилотаж) полеты требуют чуть более высоких Р, аккуратные и плавные полеты – чуть более низкого Р
I – это период времени, в течение которого записываются и усредняются угловые отклонения.
Величина силы, прикладываемой для возврата в исходное положение, увеличивается, если с течением времени угловое отклонение сохраняется, пока не будет достигнута максимальная величина усилия.
Более высокое I способствует улучшению курсовой устойчивости.
Увеличение значения I:
улучшит способность удерживать начальное положение и уменьшит дрейф, но так же увеличит задержку возврата в начальное положение. Также уменьшает влияние Р.
Уменьшение значения I:
Улучшит реакцию на изменения, но увеличит дрейф и уменьшит способность удерживать положение. Так же увеличивает влияние Р.
Акро режим: требует немного меньших значений I
Аккуратное плавное руление: требуются немного большие значения I
D – это скорость, с которой мультикоптер вернется в его начальное положение. Высокие D (т.к. D имеет отрицательное значение – это означает меньшее число, т.е. более близкое к нулю) означают, что мультикоптер вернется в первоначальное положение очень быстро.
Увеличение значения D (помните, это значит МЕНЬШЕЕ число, т.к. значение отрицательное) увеличивает скорость, с которой все отклонения будут скомпенсированы. Это означает так же увеличение вероятности появления перерегулирования и осцилляций. Так же увеличивается эффект от изменения Р (влияние Р-компоненты)
Уменьшение D: (помните, это значит БОЛЬШОЕ число, т.к. это отрицательно значение, т.е. дальше от нуля) уменьшает колебания при возврате в начальное положение. Возврат в начальное положение происходит медленнее. И так же уменьшает эффект от изменения Р.
Акро режим: увеличьте D (помните – меньшее число, т.е. ближе к нулю)
Аккуратные плавные полеты: уменьшите D (это означает большее число, т.е. дальше от нуля)
НО Я НЕ ПРЕТЕНДУЮ НА ИСТИНУ, поправте если что не так
Подвес: сервы подключаются в 10-11 выходы Предупреждение: Не подключайте питание (красная + и черная-от RC10 (A10) и RC11 (A11) разъемы для сервоприводов.
Использования сигнальных линий RC10 (A10) и RC11 (A11) разъемы.
Питание машинки через Выходы ШИМ разъем питания и заземления, контакты.
Кроме того, если у вас есть цифровые сервоприводы вы можете назначить карданного ролл/наклона для RC5, чтобы RC8 выходы, если они свободны.
Эти решения, избежать возможности того, что Pan/Tilt сервоприводы можете нарисовать слишком много тока, и вызвать APM для понижения напряжения и (сбросить).
http://copter.ardupilot.com/wiki/camera-mount/
Сделай "автотриммирование" из "дополнительная настройка"
не минусите человек сказал правду мат лишний
ЗЫ. Снимки с экрана компьбетра лучше делать через принтскрин (Prt Scr). Картинка с экрана попадет в буфер обмена, а от туда её можно через пейнт сохранить.
Сейчас допишу это вверху красным шрифтом!