Часть I http://www.parkflyer.ru/79798/blogs/view_entry/8134/
Контроллер-драйвер.
Шаговые двигатели управляются при помощи контроллера, который в свою очередь посылает команды драйверу, знающему как надо крутить двигатель.
Мощность, поданная на обмотки, распределяется по ним в определенной последовательности, что задает вращение вала двигателя в требуемом направлении на заданное число шагов.
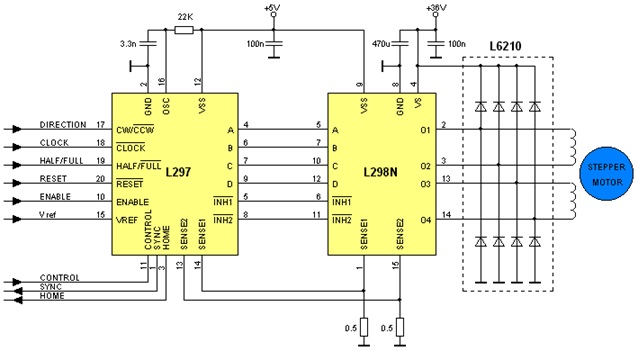
Выпор пал на пару микросхем: L297 и L298N они можно сказать созданы друг для друга, это и драйвер L298N и сам контроллер L297. Из мануала к ним получаем схему подключения. Самое привлекательно, что к данной схеме можно подключить почти любой ШД. Главное ограничение это питание самих двигателей, до 36 В.

Использование этих двух чипов приводит к упрощенной конструкции платы и минимизации числа компонентов. Кроме того, соединение этих двух чипов образует мощную плату драйвера, способную выдерживать до 36 В и 2 А на канал. В настоящее время большинство биполярных и униполярных шаговых электродвигателей, имеющих достаточную мощность для использования в этом станке, свободно производится и продается. Я решил использовать шаговые двигатели ДШИ-200-1-1, рассчитанные на напряжение питания 30 В, и потребление 1,6 А на фазу, с разрешением 1,8° на шаг. Номинальная мощность находится в допустимых пределах. Чтобы определить компоненты, необходимые для этой платы, можно обратиться к схеме.
Для активизации схемы сигнал, задающий направление вращения, от параллельного порта компьютера подается на вывод 17 микросхемы L297, а задающий количество шагов - на вывод 18.
На вход микросхемы L298 подаются управляющие сигналы от L297, которые задают последовательность переключения обмоток, что определяет вращение двигателя, а микросхема L298 обеспечивает питание моторных обмоток в надлежащем порядке. Обратите внимание, что для питания обеих микросхем необходимо наличие питания напряжением 5 В. Восемь диодов FR304 подключают обмотки двигателя к соответствующим выводам микросхемы L298. Заметим, что необходимо использовать диоды с накоплением заряда, что защитит микросхему от наведенных высоких напряжений, возникающих в момент, когда какая-либо из обмоток выключена. По своим параметрам диоды могут различаться в зависимости от мощности, потребляемой электродвигателем. Мощность в свою очередь, определяет ток, протекающий через диоды.
Выводы 1 и 15 микросхемы L298 подключены двумя силовыми резисторами с сопротивлением 0,5 Ом к общему проводу. Управляющие токи, используемые обмотками возбуждения двигателя, протекают через эти резисторы. Соответственно резистор, подключенный к выводу 1, соединен с одной из двух обмоток возбуждения, а подключенный к выводу 15, - со второй обмоткой. Это дает возможность контроллеру L297 измерять ток, который протекает внутри двигателя. Микросхема L297 также измеряет напряжение между этими резисторами и на его основе задает режим модуля ШИМ, используемого для контроля тока в обмотках электродвигателя. Резисторы R5 и R6, подключенные к выводу 15 (VREF) L297, работают как делитель напряжения и задают уровень, при достижении которого на обмотках возбуждения микросхема L298 вырабатывает сигнал об их отключении, что позволяет диодам разгрузить обмотку возбуждения. Она остается выключенной до окончания временной паузы, которая задается микросхемой L297. Резистор R4 и конденсатор С1, подключенные перемычкой к выводу 16 L297, задают тактовую частоту работы микросхемы. Конденсаторы С2, СЗ и С4 фильтруют цепи питания электроники и двигателей. Контакт 18 принимает сигналы о шаге, контакт 2 - сигналы о направлении, контакт 3 используется для соединения между собой всех управляющих плат, которые должны быть синхронизированы, а контакт 4 функционирует в качестве заземления. Шаг/полушаг переключает уровень логической «1» с вывода 19 микросхемы L297 на контакт 1 для обеспечения режима целого шага или уровень логического «0» на контакт 3 для режима полушага.
Назначение выводов
SYNC
Вывод на чипе генератора прерывателя.
SYNC соединены у всех L297s, которые для синхронизации связаны вместе, и компоненты генератора удалены на всех кроме одного. Если используется внешний источник часов, это учтено
GND
Заземление
НОМЕ
Открытый вывод коллектора, который указывает, когда L297 находится в его начальном состоянии (ABCD=0101). Транзистор является открытым, когда сигнал активный
А
Фаза А двигателя возбуждает сигнал для мощного каскада
5
Активный низкий уровень запрещает управление драйвером фаз А и В. При задействовании биполярного моста этот сигнал может использоваться, чтобы гарантировать быстрый спад тока нагрузки, когда обмотка не возбуждена. Также используется прерыватель, чтобы регулировать ток нагрузки, если уровень вывода CONTROL низок
6 В
Фаза В двигателя возбуждает сигнал для мощного каскада
7 С
Фаза С двигателя возбуждает сигнал для мощного каскада
8
Активный низкий уровень запрещает управление возбуждением фаз С и D. Функции аналогичны INH1
9 D
Фаза D двигателя возбуждает сигнал для мощного каскада
10 ENABLE
Чип допускает ввод. Когда уровни INH1, INH2 низкие (неактивные), уровни А, В, С и D также низкие
11 CONTROL
Вывод управления, определяющий действие прерывателя. При низком уровне прерыватель действует на INH1 и INH2; при высоком прерыватель выравнивает фазы А, В, С, D
12 VS
Вход напряжения питания +5 В
13 SENS2
Ввод для тока нагрузки считывает напряжение от мощных каскадов фаз С и D
14 SENS1
Ввод для тока нагрузки считывает напряжение от мощных каскадов фаз А и В
15 Vref
Опорное напряжение для схемы прерывателя. Напряжение, приложенное к этому штырьку определяет пиковый ток нагрузки .
16 OSC
Цепь RC (R, Vcc, С к земле), связанная с этой клеммой, определяет норму прерывателя. Клемма заземлена на всех соединенных микросхемах L297 кроме одной. f≈1/0,69rc
17 CW/
Направление почасовой или против часовой стрелки управляется входом. Физически направление вращения двигателя также зависит от подключения обмоток. Поэтому при внутренней синхронизации направление может быть изменено в любое время
18
Время шага. Активный отрицательный импульс на этом входе продвигает моторное приращение. Шаг происходит на положительном перепаде этого сигнала
19 HALF/
Этот вход определяет режим. Высокий уровень выбирает режим половины шага, низкий уровень - полного шага. Одна фаза в режиме полного шага получается при выборе FULL, когда преобразователь L297s - в четной позиции. Две фазы в режиме полного шага, при выборе FULL, когда преобразователь - в нечетной позиции.
20
Сброс ввода. Активный импульс низкого уровня на этом вводе возвращает преобразователь в исходную позицию (положение 1, ABCD=0101).
Надо понимать что управление происходит логическим «0» или логической «1».

Ноль – это напряжение от 0 до 0,8 В единица от 2 до 5 В плюс минус 5%.
Приводим схему в понятный для нас вид, получаем следующее:

Скачать схему: (Контроллер_1.1.spl)
И две дочернии:

скачать схему:(Контроллер_1.2.spl)
sPlan:(Portable sPlan.rar)
Для синхронизации я вывел отдельно пины от 1-го контакта, в дальнейшем они будут соединены общей шиной.
Часть III http://www.parkflyer.ru/79798/blogs/view_entry/8136/













Интересно было бы услышать про разновидности LPT? Всегда считал что это есть СТАНДАРТ для параллельной передачи.
Что же касаемо ПО,то я уверен что никто его с нуля разрабатывать не будет.
и внешние http://www.reviews.ru/clause/article.asp?id=1065
А вот теперь вопрос, какой из них заработает с вашим контроллером и с вашей программой, которую вы скачаете?! Я не говорю про написание самому. максимум что можно написать проверку пинов. Не каждая программа заработает с контроллером, но есть оптимальный набор: геморрой, финнансовые затраты, друдоемкость, эффективность. Есть критерии выбора девайса, операционной системы, драйверов к ШД, самих ШД.