Решил сделать себе квадрокоптер и вот что из этого вышло.
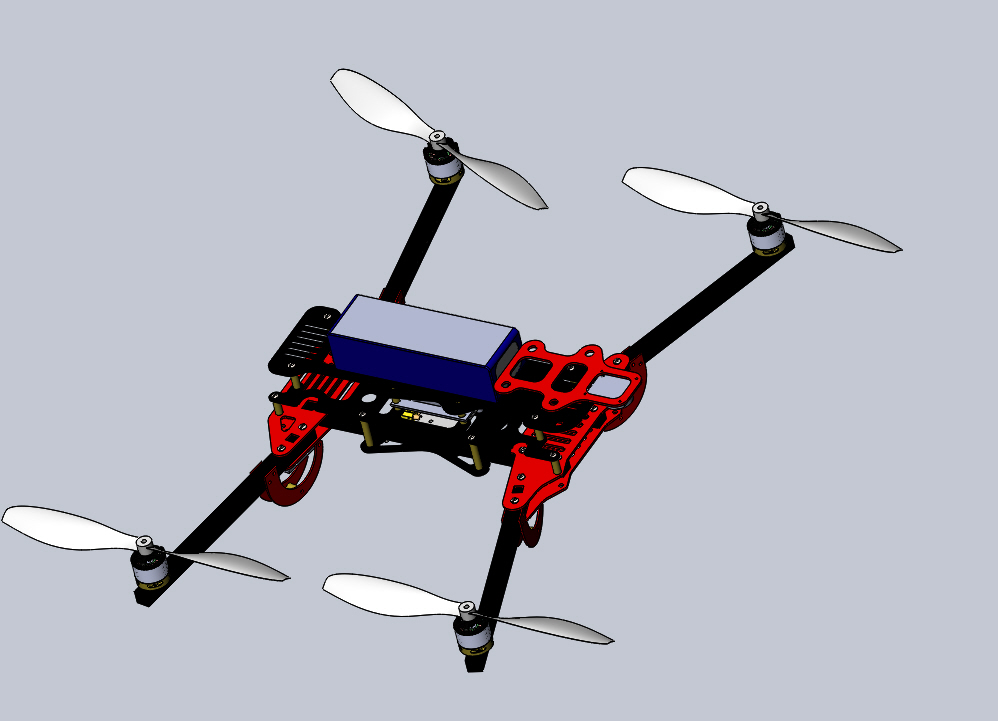
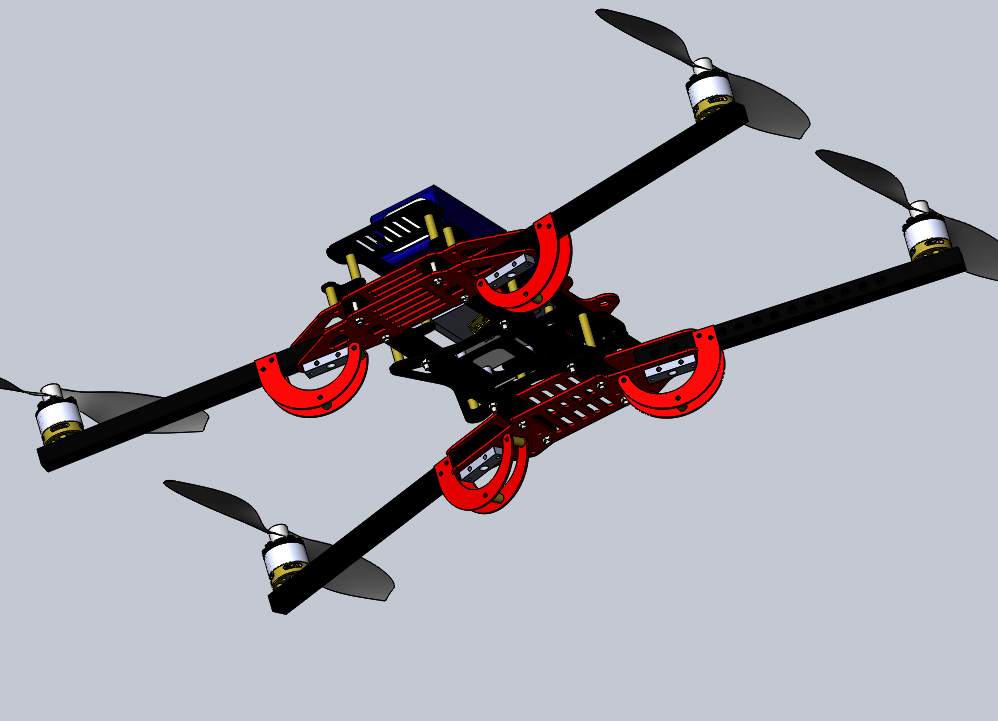
Здравствуйте. Решил я собрать себе квадрокоптер. Давно ходил вокруг данного вида летунов, много читал, ну и, наконец, решился. Нужно, чтобы поднимал 500гр для всяких камер, например, GoPro и чтобы был складным. Как обычно, начал с чертежей. Всю модель делал в SolidWorks. После нескольких вариантов остановился на вот такой конструкции:
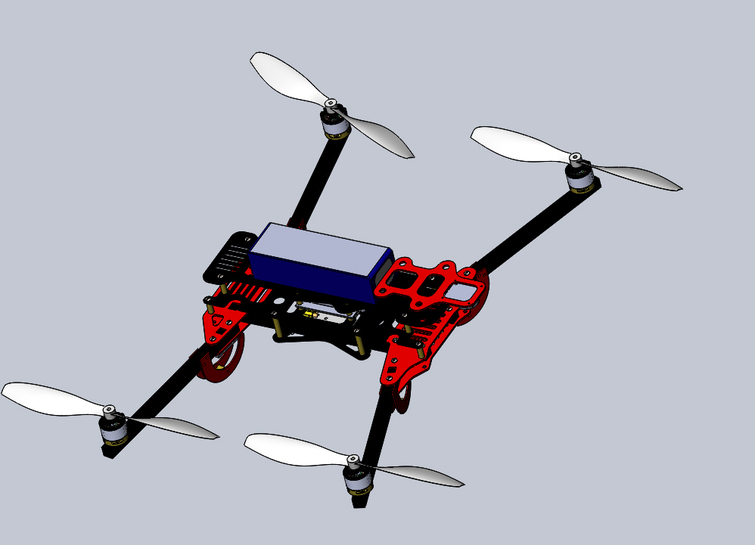
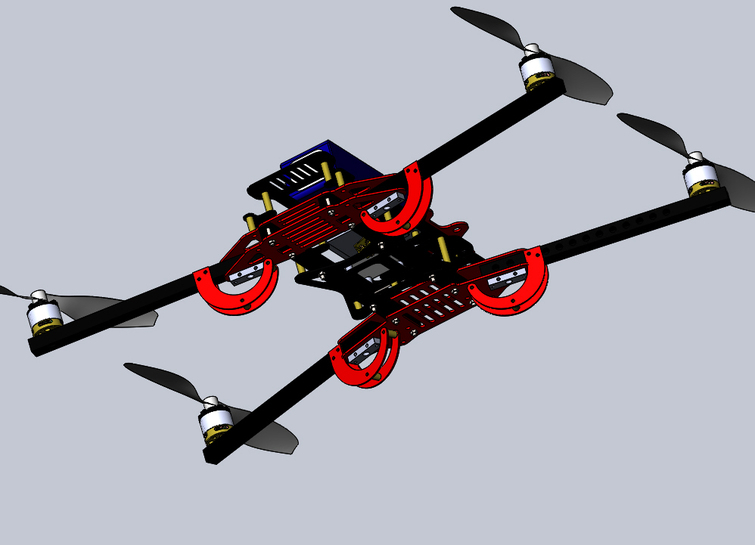
Решил пилить раму из стеклотекстолита 1,5 мм, лучи делать из алюминиевой квадратной трубы 14мм.
Также решил не обращаться в лазерную резку, не наш это метод, а вырезать все ручным лобзииииком:) Сказано - сделано. Пару вечеров работы и готово:


Стойки латунные. Поначалу хотел ставить пластиковые, но побоялся, что рама будет слишком слабая.
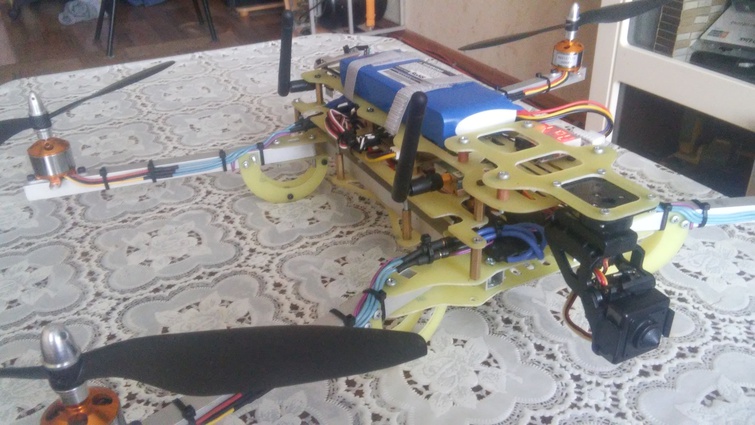
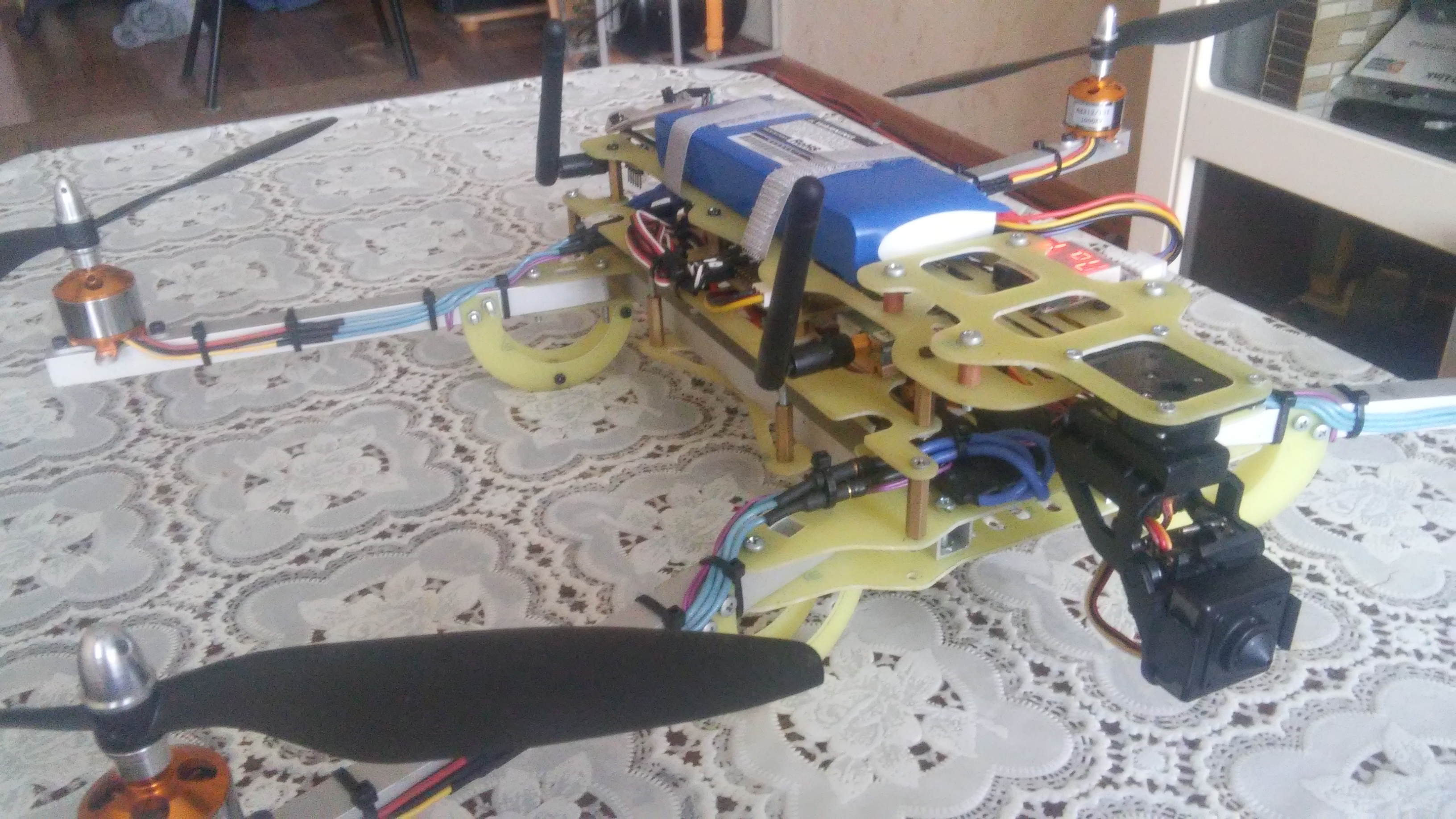
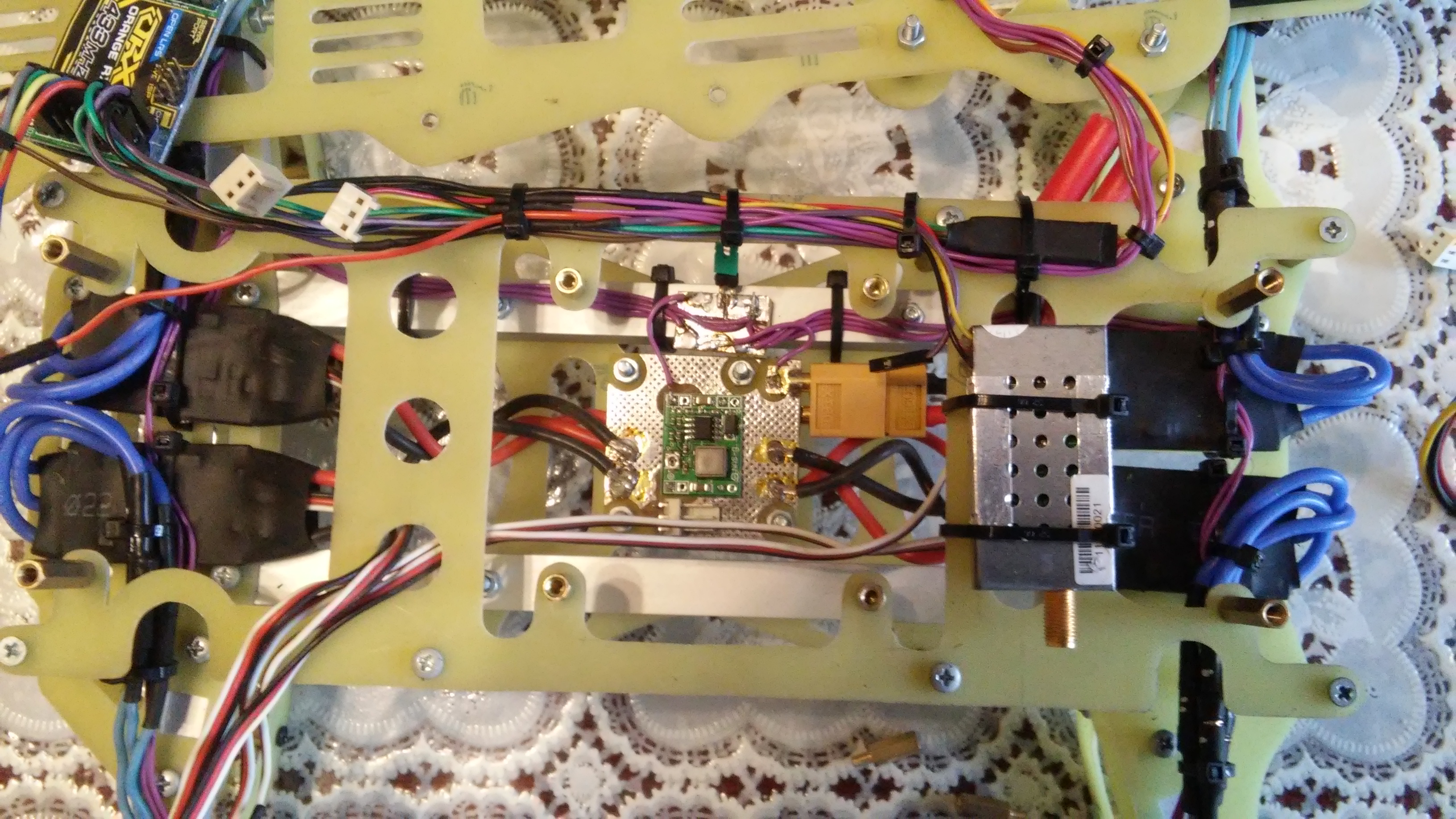
Дальше начал собирать электронику. На нижней палубе расположил всю силовую часть. Контроллеры двигателей, их разводка и светодиодная подсветка. Распределительная плата самодельная. На ней стоит DC-DC конвертер 5в.
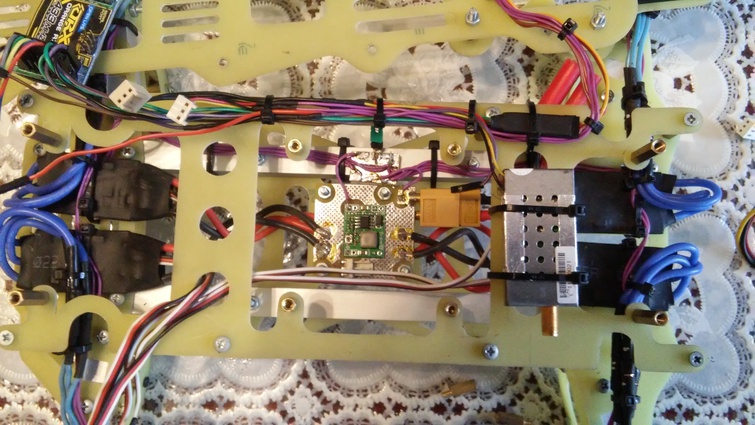
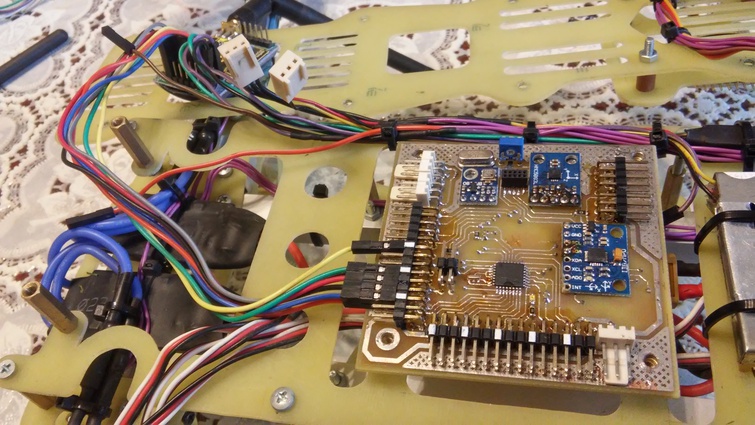
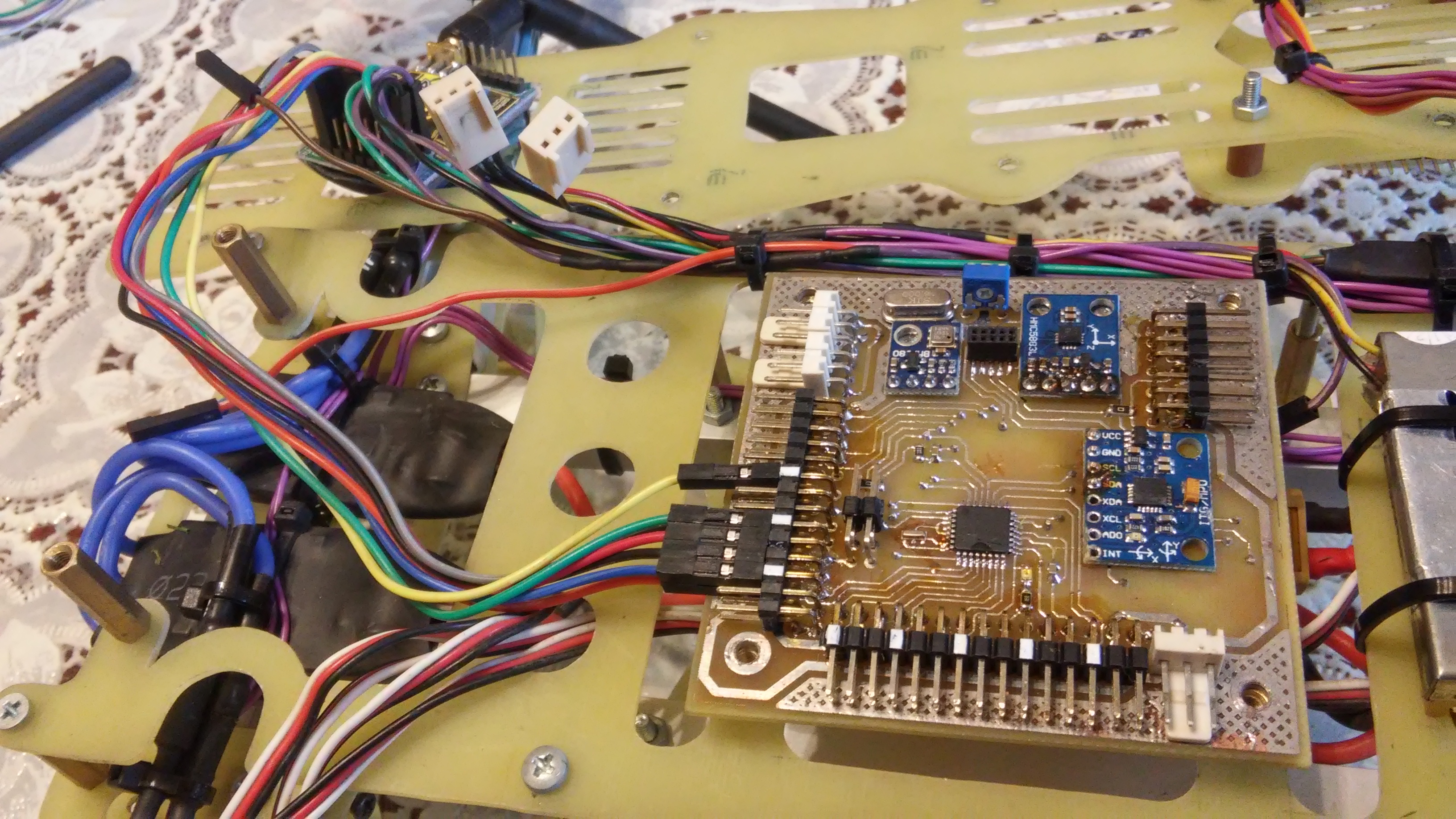
На средней палубе разместил полетный мозг и видеопередатчик. Полетный мозг у меня работает на MultiWii. Контроллер делал сам. Хотел, чтобы на одной плате был полетный котроллер, OSD (MobiDrone OSD) и БАНО. Получилась плата 60*60 мм.
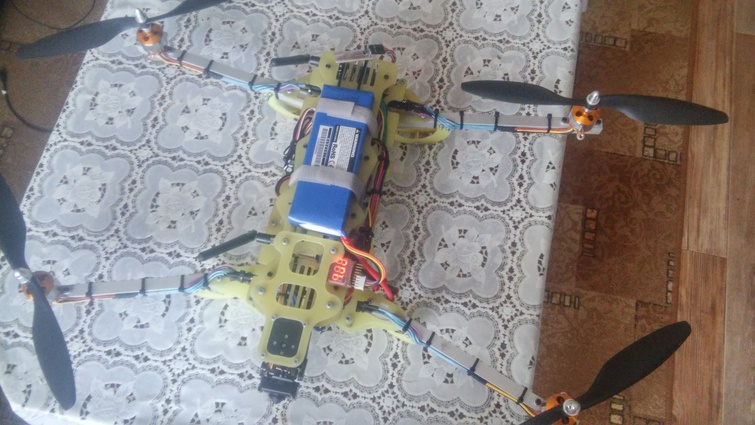
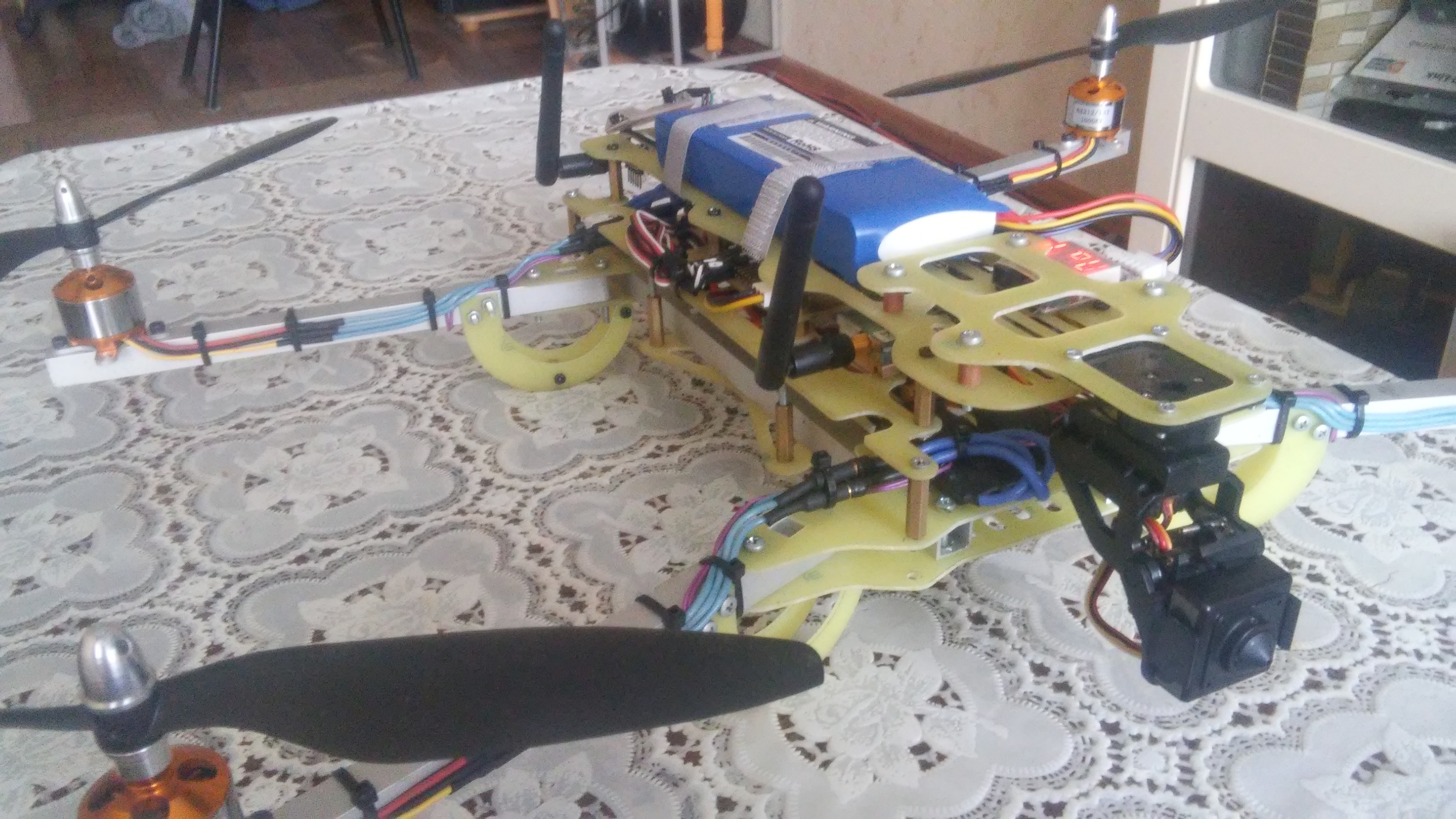
На самой верхней уже висит периферия: приемник управления, аккумулятор, курсовая камера. Камеру повесил на поворотный механизм. Он управляется с пульта на земле.



В собранном виде коптер влазит в обычный рюкзак:



Список электроники:
Моторы: xxd A2212
Регуляторы: Simonk
Аккумулятор: Аккумулятор ZIPPY Flightmax 4000mAh 3S1P 20C литий-полимерный
Товар Аккумулятор ZIPPY Flightmax 4000mAh 3S1P 20C литий-полимерный
Аккумулятор ZIPPY Flightmax 4000mAh 3S1P 20C литий-полимерный
 Товар http://www.parkflyer.ru/product/7634/
Товар http://www.parkflyer.ru/product/7634/
Сократить ссылку
Премник управления: Приемник OrangeRx Open LRS 433MHz, 9-канальный
Товар Приемник OrangeRx Open LRS 433MHz, 9-канальный
Приемник OrangeRx Open LRS 433MHz, 9-канальный
Товар http://www.parkflyer.ru/product/644082/
Сократить ссылку
Передатчик видео: Был в запасниках. Вроде такой LawMate TM-241800 2.4GHz 1000mW 8Ch Wireless A/V Transmitter Module
Товар LawMate TM-241800 2.4GHz 1000mW 8Ch Wireless A/V Transmitter Module
LawMate TM-241800 2.4GHz 1000mW 8Ch Wireless A/V Transmitter Module
Товар http://www.parkflyer.ru/product/982809/
Сократить ссылку
В итоге получился вполне летающий аппарат. Правда летал я на нем совсем не много. Кружу потихоньку на школьном стадионе возле дома. Весит коптер 1600 гр с аккумом. В будующем нужно будет поставить датчик тока и GPS.
В архиве чертежи коптера в формате SolidWorks 2015 и полетного мозга в DipTrace (Коптер.zip)
Решил пилить раму из стеклотекстолита 1,5 мм, лучи делать из алюминиевой квадратной трубы 14мм.
Также решил не обращаться в лазерную резку, не наш это метод, а вырезать все ручным лобзииииком:) Сказано - сделано. Пару вечеров работы и готово:


Стойки латунные. Поначалу хотел ставить пластиковые, но побоялся, что рама будет слишком слабая.
Дальше начал собирать электронику. На нижней палубе расположил всю силовую часть. Контроллеры двигателей, их разводка и светодиодная подсветка. Распределительная плата самодельная. На ней стоит DC-DC конвертер 5в.
На средней палубе разместил полетный мозг и видеопередатчик. Полетный мозг у меня работает на MultiWii. Контроллер делал сам. Хотел, чтобы на одной плате был полетный котроллер, OSD (MobiDrone OSD) и БАНО. Получилась плата 60*60 мм.
На самой верхней уже висит периферия: приемник управления, аккумулятор, курсовая камера. Камеру повесил на поворотный механизм. Он управляется с пульта на земле.



В собранном виде коптер влазит в обычный рюкзак:



Список электроники:
Моторы: xxd A2212
Регуляторы: Simonk
Аккумулятор: Аккумулятор ZIPPY Flightmax 4000mAh 3S1P 20C литий-полимерный
Товар
Аккумулятор ZIPPY Flightmax 4000mAh 3S1P 20C литий-полимерный Товар http://www.parkflyer.ru/product/7634/
Сократить ссылку
Премник управления: Приемник OrangeRx Open LRS 433MHz, 9-канальный
Товар
Приемник OrangeRx Open LRS 433MHz, 9-канальный Товар http://www.parkflyer.ru/product/644082/
Сократить ссылку
Передатчик видео: Был в запасниках. Вроде такой LawMate TM-241800 2.4GHz 1000mW 8Ch Wireless A/V Transmitter Module
Товар
LawMate TM-241800 2.4GHz 1000mW 8Ch Wireless A/V Transmitter Module Товар http://www.parkflyer.ru/product/982809/
Сократить ссылку
В итоге получился вполне летающий аппарат. Правда летал я на нем совсем не много. Кружу потихоньку на школьном стадионе возле дома. Весит коптер 1600 гр с аккумом. В будующем нужно будет поставить датчик тока и GPS.
В архиве чертежи коптера в формате SolidWorks 2015 и полетного мозга в DipTrace (Коптер.zip)













Регули брали 12А или 10А обошлись?
На MobiDrone OSD жалуются на частый срыв синхронизации, у Вас такое наблюдается?
Чем обусловленно то, что Вы взяли датчики барометра, магнитометра, акселерометра отдельными платами, а не сразу интегрённой платой, например, такой: 10DOF Module - подбирали датчики под себя?
Ну и последний вопрос: какое расстояние между двигателями?
Удачных полетов!
Не увидел ошибки - исправил:) Регули стоят 30А. Сильно мощные, но это мой "косяк", излишне перестраховался.
С MobiDrone вообще проблем нет, все работает на "ура". Единственно он расчитан на MultiWii 2.1, более новую прошивку не поддерживает.
Датчики у меня уже были в наличии, вот из них и делал. Вообще хочу перейти на STM32, контроллер буду переделывать. Наверно буду впаивать сами чипы, а не готовые модули дабы не увеличивать вес и размер полетного контроллера + уберу лишние конекторы. Сейчас мой контроллер весит 60 гр. Жуть как много.
Расстояние 53 см.
Китайцы скоро весь мир завоюют и мы все будем у них покупать. Ценник у них смешной. Иногда думаешь что проще купить чем самому делать, но тяга к искуству перевешивает:) а то иначе можно совсем разучиться руками работать.
Про барометр спасибо за наводку, обязательно закрою.
Пару советов всё-таки дам
1. Убирайте буллеты, так надежнее
2. Цанги - зло, это лишние вибрации. В этом плане конструкция движков неудачная, мне на ум приходит пока только крепление пропеллера стяжками (но надо проверить, не будет ли стяжка задевать за обмотки).
Вес у коптера нормальный, какое у вас время полета, газ (и ток) висения?
Цанги самому не нравятся, но по другому как крепить пропы? Стяжками конечно можно (они не будут обмотки задевать), но они же не смогут жестко и точно зафиксировать проп в горизонтальной плоскости. Велика вероятность получить "кривой" выкос пропов. Можно попробовать вот такое крепление.
Коптер весит 1600гр, взлет примерно на середине газа. Ток нечем мерить, датчик еще не установлен.
Пропадаптер, на который вы дали ссылку - конечно хорошо, но как за него будет держаться пропеллер? Ведь это не самолет, а коптер - здась усилие "на отрыв" пропеллера больше. Олычно за этот пропадаптер пропеллер крепят резинками, а на коптере резинки скорее всего коптер не удержат.
Крепя коптер на стяжки соблюсти горизонтальность достаточно просто. Сначала стяжки поджимаем близко около целевой натяжки, но слегка не доведя. Потом проверяем расстояние обоих кончиков пропеллера до стола - должно быть одинаковым. Если есть перекос - слегка натягиваем одну из стяжек больше. А потом обе стяжки натягиваем на одинаковое количество "щелчков".
После крепления и обрезки "хвостов" можно капнуть чуть чуть циакрина в замок (чтобы не расцеплялись). Да, кстати - если попадутся чёрные стяжки - их лучше не брать, они лопаются, белые лучше. По стяжкам других цветов информации не имею.
Ещё, когда я крепил пропы на стяжки - я старался сделать так, чтобы замки были в одинаковом месте на левой и на правой лопасти.
А с цангами - намаетесь, когда начнете летать с камерой (речь идет не про курсовую камеру а про запись с борта). Желе и тряска. Вот мой опыт с цангами:
Про стяжки попробую. Тем более опять же экономия в весе. Если уберу булеты и пропсейвы, то наверно грамм 80 скину:)
parkflyer.ru/64250/product/1471987/#position=378190
Следующим шагом буду делать Cleanflight, тем более уже заказл у китайцев STM32.
RC_CH3 => PA2
RC_CH4 => PA3
RC_CH7 => PB0
RC_CH8 => PB1
занимают RX -TX линии? Странно это как то.
Я выше оставил ссылку как выглядит моя железяка. На ней и летаю. Видео тоже там есть.