Здравствуйте, Общество.
В связи с наличием времени и отсутствием ”важных” дел хочу поделиться с Вами информацией, которая надеюсь, будет интересна. Начну…
Я летаю на самолётах из “потолочки” и ЕРР, другие летательные аппараты мною в принципе никогда не рассматривались: вертолет - это сложный симбиоз механики и электроники, а коптер вообще непонятной аппарат.
 Но это было до ноября прошлого года, - именно тогда я вблизи увидел квадрокоптер и мой мозг был неизлечимо заражен этим аппаратом. Квадрокоптер был собран Максимом, моим коллегой по хобби.
Но это было до ноября прошлого года, - именно тогда я вблизи увидел квадрокоптер и мой мозг был неизлечимо заражен этим аппаратом. Квадрокоптер был собран Максимом, моим коллегой по хобби.

Переспав с мыслью о постройке аналогичного аппарата, на следующий день я “окунулся” в интернет. Результатом изучения информации стало размещение заказа на комплектующие: за основу выбрана складная рама Х525 и контроллер КК2.1. Рама Х525– потому что складная, а идея складного летательного аппарата всегда навещала мою голову. Контроллер КК2.1 – доступный и летает.
И тут в мои “колеса” воткнулись палки:
- на складе в Китае была неверно указанна фамилия, для меня это обернулось 1,5 недельными переговорами с почтой России и Фижди (но это, как говорит Леонид Каневский, уже другая история);
- при перепрошивке контроллера КК2.1 произошел сбой, чип ”закрылся”. Реанимацией чипа, с помощью программного обеспечения и локальной припайке проводов, я занимался 2 недели – результат ”zer0”. Отложив ”бубен” принял решение о замене чипа. 300 рублей и недельное ожидание нового чипа были потрачены зря, - контролер “ожил”, но отказывался видеть сигналы с приемника, гироскопы работали с запозданием.
Всё…само проведение казалось против постройки квадрокоптера,… мне потребовалось осмысление и “перезагрузка”.
Необходим новый контроллер, более высокого класса (к тому времени, наблюдая за полетами Макса, я осознал преимущества наличия GPS) - на ”тендер” вышли 2 конкурента: АрдуПилот 2.5 и Naza V2. Я намеренно не хочу рассказывать о своих умозаключениях (у каждого проекта есть свои неоспоримые преимущества), - но ”тендер” выиграла Naza V2.
Naz-a на пути из Китая, а меня уже терзают сомненья: полетит она на контроллерах MultiStar или нет, улетит обратно в ”Китай” или будет подчиняться командам.
Посылка, с двумя приятными китайскими “бонусами” (был одарен цифровым контроллером питания и складной стойкой GPS) пришла, небольшая модернизация рамы и Naz-a размещена.
Несколько вечеров Интернета и вот она, первая победа – на родной Турниге 9Х удалось настроит все полетные режимы и “разумную ориентацию в пространстве”. Было нелегко, сначала настраивал на приемнике НК6кан, - безуспешно. Полетные режимы Naz-ы реализовались только с родным Турниговским приемником.

Начало апреля,…вечер,… поляна,…полное отсутствие людей – в такой обстановке проходил мой первый испытательный полет на квадрокоптере. Немного лукавлю, - первый “подлет” был конечно дома. Но по взгляду моего кота из-под кровати, я понял, - после второго “подлета”, парикмахер нам больше не понадобится…

Результат:
- Naz-a очень послушно летает;
- Naz-a очень устойчиво “весит”;
- Naz-е очень нравятся неспешные, ”плавающие” полеты.
Ура, квадрокоптер летает. Небольшие затраты 1,1$ на подсветку лучей и вот мы уже “звездим” на вечерних “полетушках”.
Эйфория от первых полетов закончилась встречей квадрокоптера и сосны, счет встречи ”0-1”в пользу дерева. По результатам “встречи” из ”команды” квадрокоптера были удалены 2-а винта и 2-е моторамы.
Я считаю это удачей, могли быть и более тяжкие последствия, а из плюсов:
- рама обзавелась 4-я моторамами из дюраля, теперь рама не на 100% из “коробки”;
- пилот аппарата понял, - на коптере нет тормозов с ABS.
Вес аппарата получился1,450 кг, вместе с батарей 3S2,2А. Среднее время полета, при включенной ”гирлянде”, 8 минут.

Из неприятностей, - некорректно выбрал винтомоторную группу (ВМГ): регулятор MS20А – двигатель PD1100 об/в – винт 8(9)SF дюймов. У данной комплектации нет ресурса для увеличения времени полета и ограничена грузоподъемность: любое увеличение веса аппарата (за счет более емкой батареи или из-за небольшой полезной нагрузки) неудовлетворительным образом отражается на времени полета.
По поводу сомнений:
- контроллеры MultiStar я не прошивал, Naz-у они слушаются;
- перед тем как ”улететь далеко”, проверяю корректность записи Naz-ой координат “аэродрома” и всегда держу палец на “крючке” ручного режима.
Дальше больше, - захотелось попасть в ”касту” FPV-шников. Заказал комплект Boskam 5.8 ГГц и камеру для видео наблюдения.
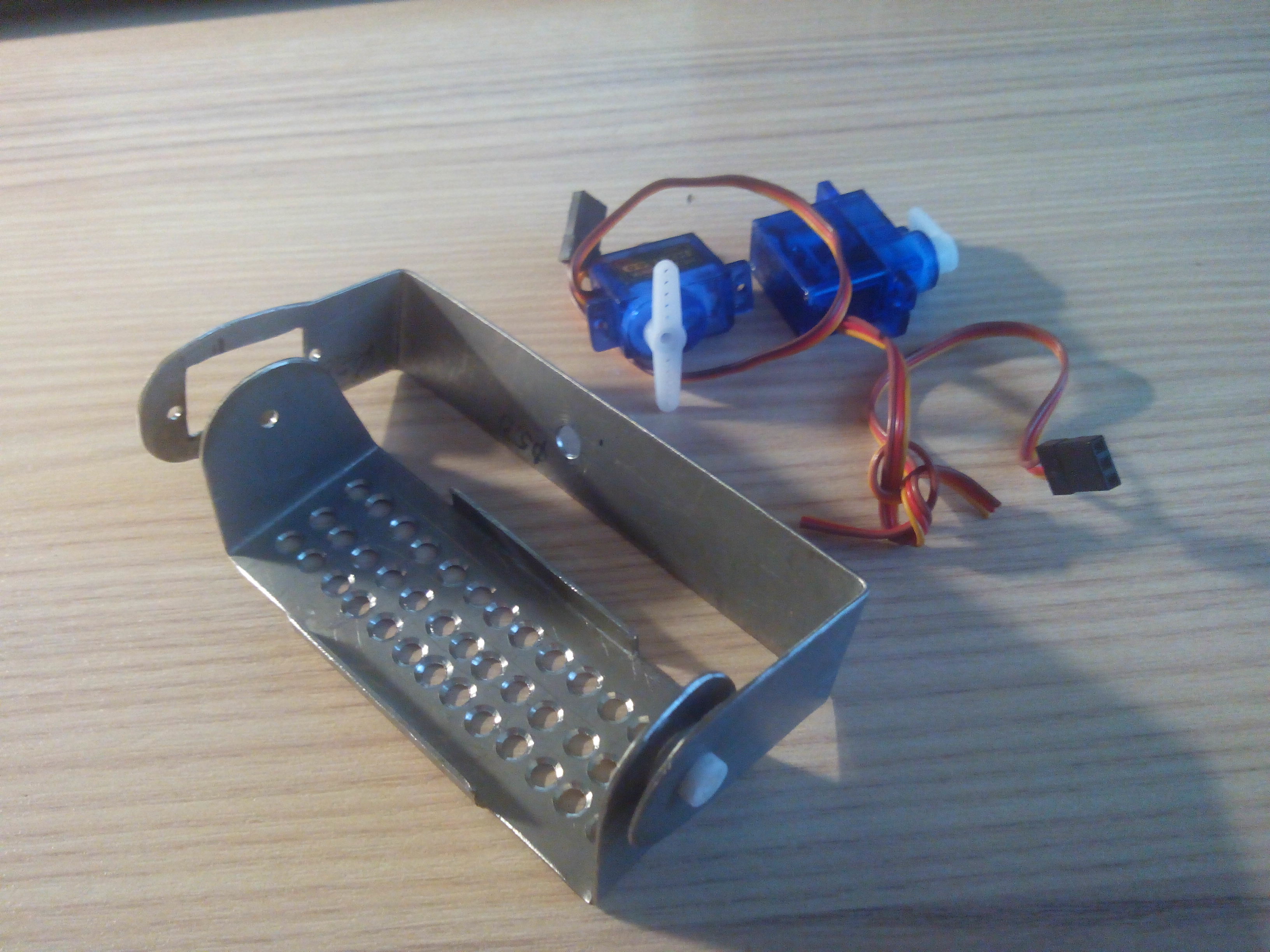
Относительно камеры, мне было всё понятно с самого начала: - камера должна ”хорошо+” снимать и писать на борту, плюс иметь видео выход. Выбор упал на китайскую SJ4000, но на тот момент у меня отсутствовала информация по наличию у неё видео выхода. Летать хотелось, поэтому заказал камеру для видео наблюдения и подвес для курсовой камеры самолета.
! маленькая ремарка: 2-х осевой серво подвес для камеры типа GoPro я всё же сделал, так как получил информацию о наличии в SJ4000 видео выхода. Почему на сервах, потому что подвес на б/к двигателях добавит массу и энергопотребление…покупку камеры и решение этих проблем я отложил на зиму…
Посылка пришла, паяльник ”обвенчал” передатчик с камерой. Поход в магазин строительных материалов, автомобильный телевизор (взятый в аренду у тестя), - и вот она ”наземная станция”. Да,…некрасиво… - но это “home made”.

После 2-х месяцев эксплуатации станции, был установлен “родной” легкий7”монитор и DVR рекордер. При длительной работе, видео приемник сильно нагревался, - пришлось принудительно охлаждать кулером.

Подвес.
Вообще если честно, в этой теме я чувствовал себя Колумбом. Первооткрывателем потому, что из информации полученной из Интернета, а точнее её полного отсутствия, вкладывалось впечатление, что я единственный пилот, кто нашел деньги на Naz-у, но не может купить для неё “путёвый” подвес.
Из скудного раздела Gimbal, инструкции Naz-ы, я сделал вывод, что возможно подсоединение к контроллеру 2-х осевого подвеса. Подсоединил в разъемы 2-е серво машинки, послал на 7-ой канал Турниги “левую крутилку”…кручу, кручу - а там аrmorácia (рус.Хрен).
Три нервных сигареты были потрачены на то, чтоб догадаться, - Naz-a будет крутить серву только после того, как на этом канале будет произведена калибровка….
Серва “кивания камеры” управляется с Тургниги, обе сервы ”вроде как” реагируют на наклоны рамы!!! - ну вот, в теории 2-х осевой подвес, стабилизирующийся с Naz-ы должен работать.
Получил китайский 3х$ подвесе для ”курсовой камеры” самолета. Данный подвес не совсем подходил к квадрокоптеру, но ”напильник” всегда под рукой.
Камеру с подвесом и передатчик решил закрепить на коптере с помощью полосок из дюраля. Все встало на место, но после этого внешний вид коптера меня сильно разочаровывал – если раньше это был ”зловещий сюрикен”, теперь он походил на “длинноногую Тортилу” (извинтите, фотографий этого “апгрейда” не сохранилось).
Проект FPV был ”заморожен”.
Решение далось не просто, я уже сильно привязался к Х525, но: VISA перевела мои деньги в Китай, Китай отправил в Россию новую раму Аллигатор и Naz-овский iOSD. Я уехал в отпуск.
Пообщавшись с коллегами в Анапе (привет Олегу Меньшикову!) и набравшись сил, приступил к новому проекту.
Один вечер – демонтаж оборудования.
Один вечер – монтаж верхней части рамы. Лучи с LED подсветкой, двигатели, регуляторы, GPS стойка, разводка питания, два микро выключателя (один для LED подсветки, другой для видео передатчика), LED индикатор Naz-ы.

Один вечер – монтаж нижней части рамы. Камера с подвесом, стабилизатор питания, контроллер, приемник, iOSD, видео передатчик. Разместил всё на ”мозго-раме” из органического стекла. Подвес, логично, избавился от горизонтального поворота. Для компактного размещения пришлось так же удалить корпус приемника.
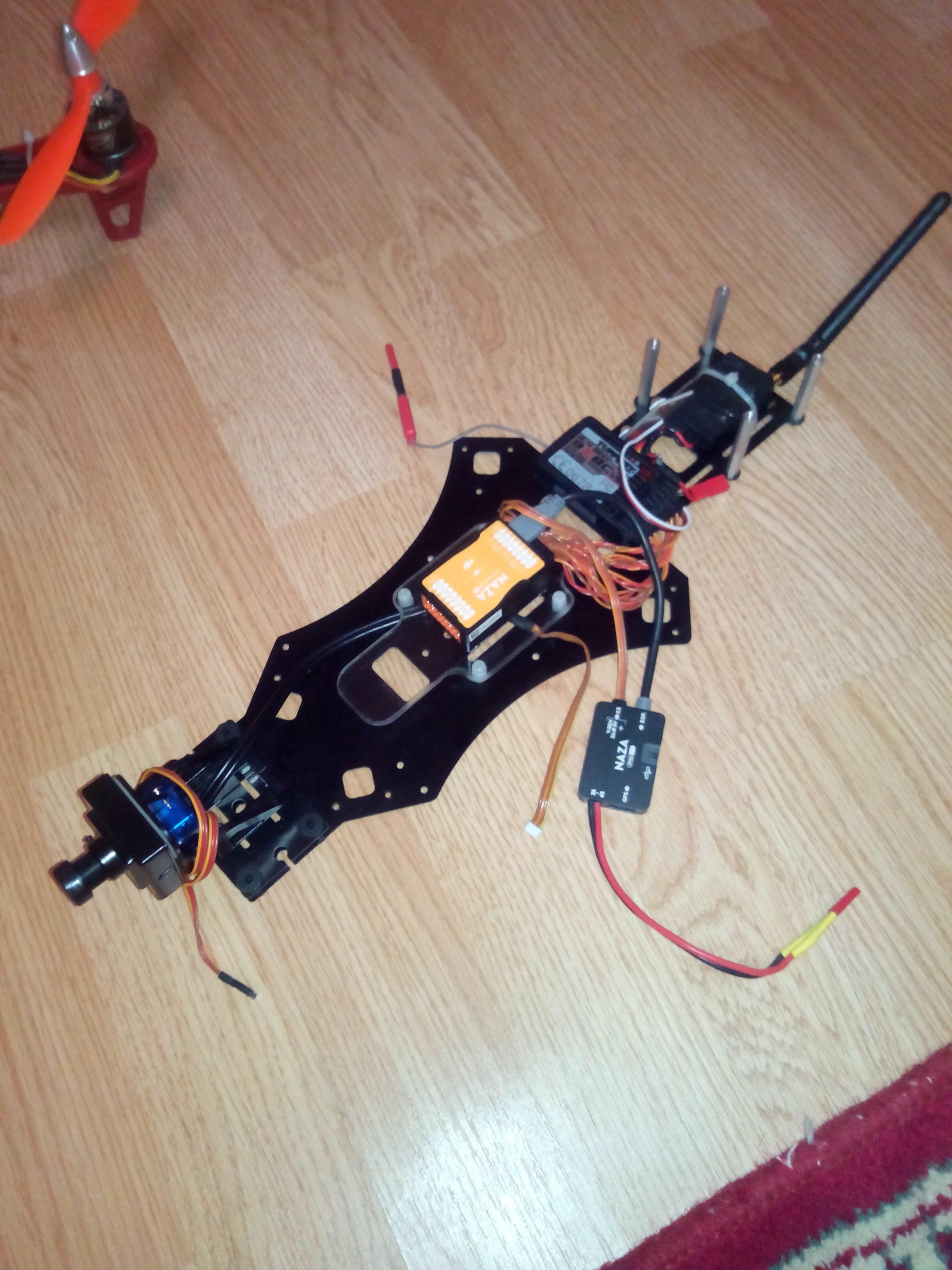
Для монтажа использовал автомобильный 2-х сторонний скотч и пластиковые стяжки.
Данную компоновку оборудования считаю очень удачной – при раздельном монтаже ничего не мешается, а при соединении рам не требуется ювелирная работа.
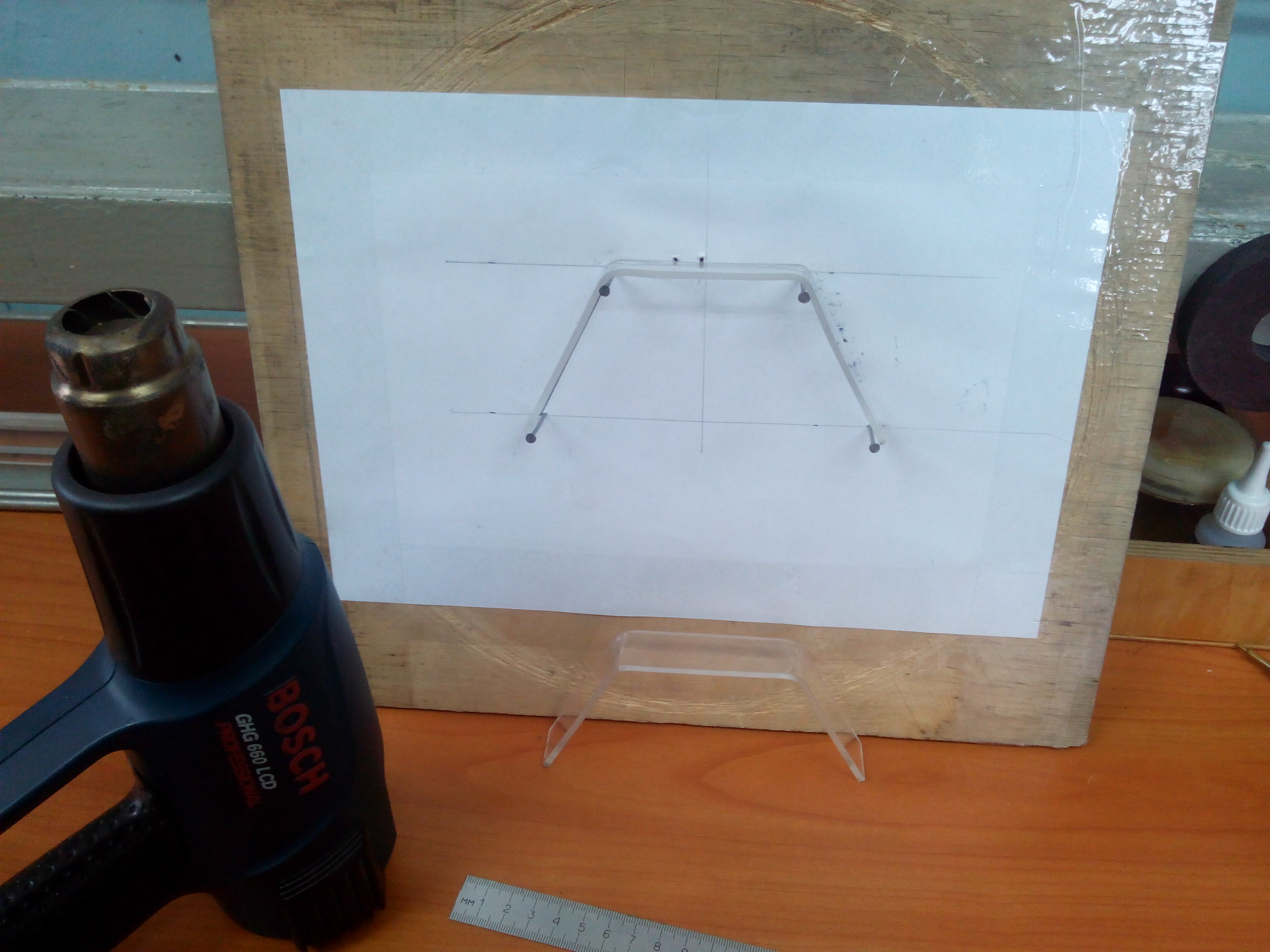
Вроде всё, …. но чего-то не хватает. Шасси!
Кусок любимого органического стекала, четыре гвоздя, нержавеющая трубка и Вуаля!

Вес с ходовым аккумулятором 3S2,2A и аккумулятором для видео передатчика 2S0,8A составил1430 грамм. Время полета с ”гирляндой”, 8 минут. Коптера решил назвать ”Гаррик”, чем-то он моего эрдельтерьера напомнил.
Не люблю статьи без видео,…смотрите.
Это нарезка из одной вечерней “полетушки”, в конце ”краш” – в коптер врезался Pitts. После резкого приземления, на один луч пришлось наложить ”шину”, заменить 2-а винта, серву подвеса и штырь стойки GPS.
Ролик “кривой по качеству”, без особого “адреналина и видовых сцен”, ну уж извините – я не G.Lucas; продукты Adobe в процессе освоения, а статья так и просилась в дневник.
Технической и технологической информации в статье содержится немного, но я и не старался написать ”инструкцию / отчёт” или поделиться “уникальными знаниями”. Вместо этого, прослеживается ”эволюция” человека - коптериста, со своими неудачами и победами.
Надеюсь, что “бывалым” немного поднял настроение, а ”зелёных” воодушевил на творчество.
Спасибо за внимание, понимание и усидчивость. Удачи всем!
 P.S. страждающему по коптерам земляку могу ”безвозмездно” отдать раму Х525.
P.S. страждающему по коптерам земляку могу ”безвозмездно” отдать раму Х525.













Осталась надежда только на Вас.
Спасибо, Денис.
Возьму на “карандаш”.
У меня рама почти такая же Hobbyking X550, регули те же, наза м-лайт.
Поменяй движки на эти http://www.parkflyer.ru/product/1022309/ очень стабильные не греются даже с нагрузкой в пол кило.
Летаю на пропах 12*4,5. Акум зипик 5800 3 баночки.
Вес квадра с акумом и всем ослальным 1290 гр.
В общем время висения на пропах 12*4,5 получилось 25 минут, на отсечку 3,3 вольта на банку. Время полета с той же подсветкой 18 минут. На пропах 10*5,5 - 21 минута висения. На родных из комплекта 10*4,5 не мерил, но кривая не в их пользу.
С сосной встречался 3 раза. Счет 3:0. Удачных полетов.
Спасибо. Совет, относительно двигателей, принят.
Сам думаю об переходе на Назу с AIOPа, но часто сейчас на форумах проскакивают сообшения об глюках Назы.
В городе рядом со девятиэтажкой по высоте 5-10 см по горизонту 0,5-2 м. Но это из за того, что здания закрывают часть спутников. А обычно точность как и за городом.
Вообще очень стабильная штука бывает что висит как статичная ход 1-2 см.
Меня тоже АРМ семейство немного подустало, свою назу лайт я жду с бангуда. Пойдет на новый ещё непостроенный коптер.
Регуляторы наверное все же придется перепрошить. Что бы там не писал производитель, а на регуляторах мультистар всё же не коптерная прошивка. После прошивки назе будет гораздо проще стабилизировать.
Понравилась конструкция шаськи. Где бралось волшебное оргстекло?
Приветствую уроженца с одной местности! “Волшебное стекло” брал на работе, - остатки социалистических стендов.
На ролике это с нее запись ?