Радиоуправляемые модели самолетов, вертолетов, автомобилей, катеров, яхт и танков.
Гарантируем ваше удовольствие либо возврат денег. На сайте огромное количество отзывов о нашей работе и товарах.
Multiwii and Megapirate AIO Flight Controller w/FTDI (ATmega 2560)
Мы сохраняем такие товары, чтобы дать возможность Вам получать информацию из накопленных комментариев и отзывов.




.jpg)



| Аналогичные товары | Поставщик | В наличии | Цена / Вес | Количество бонусов за товар | В корзину / Отметить | |
|---|---|---|---|---|---|---|
-
Эта плата имеет несколько последовательных интерфейсов, а также выделенный интерфейс I2C. Сейчас вы можете подключить GPS напрямую, и у вас есть дополнительные порты для других внешних устройств. Кроме того, новый ATmega 2560 имеет больше выводов IO,вам требуется подключить приёмник и произвести первичную настройку контроллера.
Этот контроллер имеет встроенный MicroUSB порт на борту, вам больше не понадобится дополнительный FTDI USB интерфейс.
Контроллер имеет современный набор датчиков, MPU6050 от InvenSense который обладает MEMS гироскопом / акселерометром на одном кристалле.Также на плате имеется 3х-осевой магнитометр и барометр с разрешением 0,01. миллибар(погрешность измерения примерно 10см)
Всегда хотели иметь функции GPS? Теперь вы можете это сделать всего лишь присоеденив 10 Гц модуль GPS (скоро появится в наличии).
Особенности:
• Поддерживаются проекты MegaPirateNG и MultiWii
• 8 выходов для двигателей
• 8 входных каналов для стандартного приемника
• 4 последовательных порта для отладки: Bluetooth модуль / OSD / GPS / телеметрия
• 2 выхода для подключения сервомашинок тангажа и крена(для установки подвеса стабилизации камеры)
• 1 выход серво который вы можете настроить для одиночных нажатий спусковой кнопки камеры
• 6 Аналоговый выход для ваших девайсов
• I2C порт для подключения дополнительных датчиков или устройств
• Две линии питания датчиков 3,3в и 5в
• ATMega 2560 Микроконтроллер
• MPU6050 3х-осевой гироскоп / 3х-осевой акселерометр
• HMC5883L 3-осевой цифровой магнитометр
• MS5611-01BA01 Барометр
• FT232RQ USB-UART чип и Micro USB выходРежим полета для Multiwii:
• Базовые режимы
- Акро (для стабилизации задействован только гироскоп)
- Полная стабилизация (для стабилизации задействован гироскоп и акселерометр)
- Удержание высоты
- Удержание курса• Дополнительные режимы
- КэаФри(режим при включении которого не важно где у коптера перед\зад\лево\право относительно Вас, Вы никогда не запутаетесь если отпустите коптер далеко и потеряете его ориентацию, этот режим поможет Вам вернуть коптер)
- Удержание позиции по GPS (необходимо подключение GPS приемника)
- Возврат домой (необходимо подключение GPS приемника)Режим полета для MegaPirate:
• Акро (для стабилизации задействован только гироскоп)
• Полная стабилизация (для стабилизации задействован гироскоп и акселерометр)
• Удержание высоты
• Лойтер (необходимо подключение GPS приемника)
• Полёт по точкам (необходимо подключение GPS приемника)
• Удержание позиции (необходимо подключение GPS приемника)
• Полёт вокруг точки (необходимо подключение GPS приемника)
• Возврат домой (необходимо подключение GPS приемника)
• Режим удержания курса
• Следуй за мной (необходимо подключение GPS приемника)
Питание контроллера осуществляется двумя способами:
- При подключении питания от регулятора ESC на разъем выходов для двигателей, перемычка J1 должна быть установлена.
- При подключении питания к разъему 5V~12V, перемычка J1 должна быть удалена.Размеры(платы): 50ммx50мм
Высота: 11.6мм
Расстояние между крепежными отверстиями: 45 мм
Диаметр отверстий: 3 мм
Вес: 14.2g
Комплект поставки включает в себя:
1 х AIO PRO контроллер
3 х 3Pin в 1Pinx3 кабель 100 мм
1 х 3Pin в 3Pin кабель 100 мм
1 х 1,25 мм Molex 4pin кабель 100 мм
1 х 1,25 мм Molex 6pin кабеля 100 мм
1 х 1,25 мм Molex 8 контактный кабель 100 мм
Имеется форум по настройке данной платы: http://forum.rcdesign.ru/f123/thread283798.html
Подробная инструкция по установке проекта MegaPirate:
http://aviamax.livejournal.com/54910.html
Установка прошивки Multiwii:
http://multiwiifaq.ts9.ru/index.html
-
This board features a multiple serial interface as well as a dedicated I2C interface. You can now plug in a GPS directly, and you still have extra ports for other external devices. In addition to that, the new ATmega 2560 has more IO pins so it can both read the PWM signal from your receiver and it has enough PWM outputs to control the ESCs directly without the need to do the PWM signal in software.
This controller even has a MicroUSB port right on the board, no need to attach an extra FTDI USB interface.
The motion sensing side features a new generation MEMS Gyro, a MPU6050 by InvenSense, which has the MEMS Gyro / Accelerometer sensor on a single chip. There’s also a 3-axis magnetometer and a barometer sensor with a resolution of 0.01 millibar – approximately a 10 cm height difference.
Interested in GPS functionality? Well this is one of the most cost effective ways to get started - simply add a 10Hz GPS module (coming soon) and you’re good to go!
Features:
• Supported MegaPirateNG and MultiWii firmware
• Up to 8-axis motor output
• 8 input channels for standard receiver
• 4 serial ports for debug/Bluetooth Module/OSD/GPS/telemetry
• 2 servos output for PITCH and ROLL gimbal system
• 1 servo output to trigger a camera button
• 6 Analog output for extend device
• A I2C port for extend sensor or device
• Separate 3.3V and 5V LDO voltage regulator
• ATMega 2560 Microcontroller
• MPU6050 6 axis gyro/accel with Motion Processing Unit
• HMC5883L 3-axis digital magnetometer
• MS5611-01BA01 highprecision altimeter
• FT232RQ USB-UART chip and Micro USB receptacle
• On board logic level converter
Flight mode for Multiwii:
• One of the following basic modes
– Acro
– Level
– Alt Hold
- Heading Lock
• Optional mode
– HeadFree (CareFree)
– GPS Hold (Need GPS receiver)
– GPS Back to home position (Need GPS receiver)
Flight mode for MegaPirate:
• Acro
• Alt Hold
• Loiter (uses GPS)
• Guided (uses GPS)
• Position (uses GPS)
• Circle (uses GPS)
• RTL (uses GPS)
• Auto(uses GPS)
• Follow Me(uses GPS)Sizes:
Dimension: 50mmX50mm
Height: 11.6mm
Fixing hole spacing: 45mm
Hole diameter: 3mm
Weight: 14.2g
Includes:
1 x AIO PRO FC
3 x 3Pin to 1Pinx3 cable 100mm
1 x 3Pin to 3Pin cable 100mm
1 x Molex 1.25mm 4Pin cable 100mm
1 x Molex 1.25mm 6Pin cable 100mm
1 x Molex 1.25mm 8Pin cable 100mm
-
Эта плата имеет несколько последовательных интерфейсов, а также выделенный интерфейс I2C. Сейчас вы можете подключить GPS напрямую, и у вас есть дополнительные порты для других внешних устройств. Кроме того, новый ATmega 2560 имеет больше выводов IO,вам требуется подключить приёмник и произвести первичную настройку контроллера.
Этот контроллер имеет встроенный MicroUSB порт на борту, вам больше не понадобится дополнительный FTDI USB интерфейс.
Контроллер имеет современный набор датчиков, MPU6050 от InvenSense который обладает MEMS гироскопом / акселерометром на одном кристалле.Также на плате имеется 3х-осевой магнитометр и барометр с разрешением 0,01. миллибар(погрешность измерения примерно 10см)
Всегда хотели иметь функции GPS? Теперь вы можете это сделать всего лишь присоеденив 10 Гц модуль GPS (скоро появится в наличии).
Особенности:
• Поддерживаются проекты MegaPirateNG и MultiWii
• 8 выходов для двигателей
• 8 входных каналов для стандартного приемника
• 4 последовательных порта для отладки: Bluetooth модуль / OSD / GPS / телеметрия
• 2 выхода для подключения сервомашинок тангажа и крена(для установки подвеса стабилизации камеры)
• 1 выход серво который вы можете настроить для одиночных нажатий спусковой кнопки камеры
• 6 Аналоговый выход для ваших девайсов
• I2C порт для подключения дополнительных датчиков или устройств
• Две линии питания датчиков 3,3в и 5в
• ATMega 2560 Микроконтроллер
• MPU6050 3х-осевой гироскоп / 3х-осевой акселерометр
• HMC5883L 3-осевой цифровой магнитометр
• MS5611-01BA01 Барометр
• FT232RQ USB-UART чип и Micro USB выходРежим полета для Multiwii:
• Базовые режимы
- Акро (для стабилизации задействован только гироскоп)
- Полная стабилизация (для стабилизации задействован гироскоп и акселерометр)
- Удержание высоты
- Удержание курса• Дополнительные режимы
- КэаФри(режим при включении которого не важно где у коптера перед\зад\лево\право относительно Вас, Вы никогда не запутаетесь если отпустите коптер далеко и потеряете его ориентацию, этот режим поможет Вам вернуть коптер)
- Удержание позиции по GPS (необходимо подключение GPS приемника)
- Возврат домой (необходимо подключение GPS приемника)Режим полета для MegaPirate:
• Акро (для стабилизации задействован только гироскоп)
• Полная стабилизация (для стабилизации задействован гироскоп и акселерометр)
• Удержание высоты
• Лойтер (необходимо подключение GPS приемника)
• Полёт по точкам (необходимо подключение GPS приемника)
• Удержание позиции (необходимо подключение GPS приемника)
• Полёт вокруг точки (необходимо подключение GPS приемника)
• Возврат домой (необходимо подключение GPS приемника)
• Режим удержания курса
• Следуй за мной (необходимо подключение GPS приемника)
Питание контроллера осуществляется двумя способами:
- Подключиние питания 5В от ESC или UBEC, J1 перемычка должна быть установлена.
- Подключение питания 5V ~ 12V, J1 перемычка должна быть удалена.Размеры(платы): 50ммx50мм
Высота: 11.6мм
Расстояние между крепежными отверстиями: 45 мм
Диаметр отверстий: 3 мм
Вес: 14.2g
Комплект поставки включает в себя:
1 х AIO PRO контроллер
3 х 3Pin в 1Pinx3 кабель 100 мм
1 х 3Pin в 3Pin кабель 100 мм
1 х 1,25 мм Molex 4pin кабель 100 мм
1 х 1,25 мм Molex 6pin кабеля 100 мм
1 х 1,25 мм Molex 8 контактный кабель 100 мм
Имеется форум по настройке данной платы: http://forum.rcdesign.ru/f123/thread283798.html
Подробная инструкция по установке проекта MegaPirate:
http://aviamax.livejournal.com/54910.html
Наконец-то появилась толковая инструкция по установки проекта MultiWii:
http://multiwii.p.ht/index.html
-
This board features a multiple serial interface as well as a dedicated I2C interface. You can now plug in a GPS directly, and you still have extra ports for other external devices. In addition to that, the new ATmega 2560 has more IO pins so it can both read the PWM signal from your receiver and it has enough PWM outputs to control the ESCs directly without the need to do the PWM signal in software.
This controller even has a MicroUSB port right on the board, no need to attach an extra FTDI USB interface.
The motion sensing side features a new generation MEMS Gyro, a MPU6050 by InvenSense, which has the MEMS Gyro / Accelerometer sensor on a single chip. There’s also a 3-axis magnetometer and a barometer sensor with a resolution of 0.01 millibar – approximately a 10 cm height difference.
Interested in GPS functionality? Well this is one of the most cost effective ways to get started - simply add a 10Hz GPS module (coming soon) and you’re good to go!
Features:
• Supported MegaPirateNG and MultiWii firmware
• Up to 8-axis motor output
• 8 input channels for standard receiver
• 4 serial ports for debug/Bluetooth Module/OSD/GPS/telemetry
• 2 servos output for PITCH and ROLL gimbal system
• 1 servo output to trigger a camera button
• 6 Analog output for extend device
• A I2C port for extend sensor or device
• Separate 3.3V and 5V LDO voltage regulator
• ATMega 2560 Microcontroller
• MPU6050 6 axis gyro/accel with Motion Processing Unit
• HMC5883L 3-axis digital magnetometer
• MS5611-01BA01 highprecision altimeter
• FT232RQ USB-UART chip and Micro USB receptacle
• On board logic level converter
Flight mode for Multiwii:
• One of the following basic modes
– Acro
– Level
– Alt Hold
- Heading Lock
• Optional mode
– HeadFree (CareFree)
– GPS Hold (Need GPS receiver)
– GPS Back to home position (Need GPS receiver)
Flight mode for MegaPirate:
• Acro
• Alt Hold
• Loiter (uses GPS)
• Guided (uses GPS)
• Position (uses GPS)
• Circle (uses GPS)
• RTL (uses GPS)
• Auto(uses GPS)
• Follow Me(uses GPS)Input power selection:
• One of the following ways
– Connect 5V power cable from ESC or UBEC to the ESC/Servo port, the J1 jumper must be closed.
– Connect 5V~12V power cable to the extend power port, the J1 jumper must be removed.
Note: When using Extend Board, AIO PRO must be powered from the extend power port.
Sizes:
Dimension: 50mmX50mm
Height: 11.6mm
Fixing hole spacing: 45mm
Hole diameter: 3mm
Weight: 14.2g
Includes:
1 x AIO PRO FC
3 x 3Pin to 1Pinx3 cable 100mm
1 x 3Pin to 3Pin cable 100mm
1 x Molex 1.25mm 4Pin cable 100mm
1 x Molex 1.25mm 6Pin cable 100mm
1 x Molex 1.25mm 8Pin cable 100mm
SALE PRICE: $34.95 limited time only!
Упоминается в статьях и вопросах
 Бикоптер UH-144 из Halo357
Бикоптер UH-144 из Halo35726 июня 2014 года в 12:55 | Алекс Инкогнито Мск
 Статья http://www.parkflyer.ru/blogs/view_entry/8458/
Статья http://www.parkflyer.ru/blogs/view_entry/8458/ 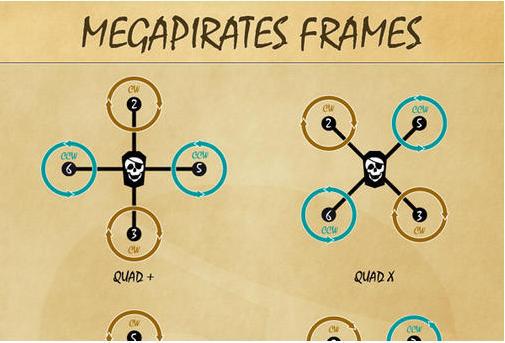 Шаг за шагом за пиратом!112
Шаг за шагом за пиратом!11215 октября 2013 года в 13:07 | Тимур Ганиев Реж
Статья http://www.parkflyer.ru/blogs/view_entry/2608/  Мой первый коптер DJI F550.80
Мой первый коптер DJI F550.805 ноября 2013 года в 07:52 | Александр Н Санкт-Петербург
Статья http://www.parkflyer.ru/blogs/view_entry/2815/ Бикоптер UH-144 из Halo35726 июня 2014 года в 12:55 | Алекс Инкогнито Мск
Статья http://www.parkflyer.ru/blogs/view_entry/8458/ Шаг за шагом за пиратом!11215 октября 2013 года в 13:07 | Тимур Ганиев Реж
Статья http://www.parkflyer.ru/blogs/view_entry/2608/ Мой первый коптер DJI F550.805 ноября 2013 года в 07:52 | Александр Н Санкт-Петербург
Статья http://www.parkflyer.ru/blogs/view_entry/2815/ 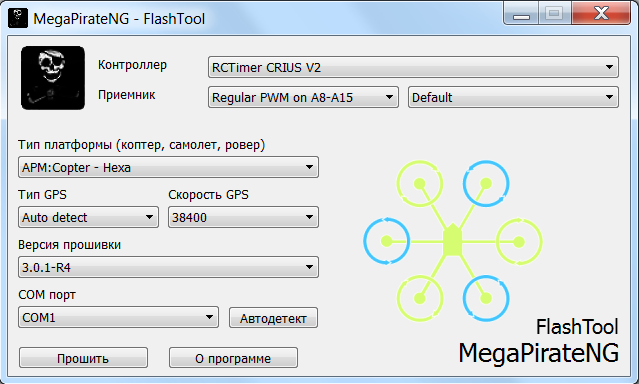 Прошивка контроллера AIOP через MegaPirateNG-FlashTool68
Прошивка контроллера AIOP через MegaPirateNG-FlashTool6823 марта 2014 года в 13:51 | Александр Н Санкт-Петербург
Статья http://www.parkflyer.ru/blogs/view_entry/4669/  Самодельная рама для квадрокоптера начинающим.62
Самодельная рама для квадрокоптера начинающим.6212 августа 2013 года в 17:40 | Дмитрий Востриков Липецк
Статья http://www.parkflyer.ru/blogs/view_entry/2051/  Квадрокоптер 4Copter v.257
Квадрокоптер 4Copter v.25714 августа 2013 года в 23:52 | Роман Перхун Десногорск
Статья http://www.parkflyer.ru/blogs/view_entry/2077/  Комплектация мультироторов или очередная попытка систематизировать всю информацию по теме42
Комплектация мультироторов или очередная попытка систематизировать всю информацию по теме4215 октября 2013 года в 23:17 | Павел Петунин Томск
Статья http://www.parkflyer.ru/blogs/view_entry/2617/  Помогите выбрать запчасти для квадрокоптера6
Помогите выбрать запчасти для квадрокоптера65 июня 2014 года в 16:20 | Кирилл Киблер Москва
Вопрос http://www.parkflyer.ru/blogs/view_entry/8417/  Нужна помощь по настройки платы Multi Wii Pro crius aiop v2 2
Нужна помощь по настройки платы Multi Wii Pro crius aiop v2 221 декабря 2014 года в 00:13 | Pavel Sergeev Чебоксары, Чувашская Респ.
Вопрос http://www.parkflyer.ru/blogs/view_entry/10228/  Пожалуйста помогите с настройкой aux каналов Futaba t8j 2
Пожалуйста помогите с настройкой aux каналов Futaba t8j 218 марта 2015 года в 21:50 | Денис Головин Саратов
Вопрос http://www.parkflyer.ru/blogs/view_entry/10982/  Ряд вопросов0
Ряд вопросов016 ноября 2014 года в 00:29 | Конструктор АД Москва
Вопрос http://www.parkflyer.ru/blogs/view_entry/9970/  Подключение полетного контроллера квадрокоптера0
Подключение полетного контроллера квадрокоптера02 марта 2015 года в 21:27 | Михаил Егоров Москва
Вопрос http://www.parkflyer.ru/blogs/view_entry/10838/ Помогите настроить серво подвес022 апреля 2015 года в 17:52 | Иван Емельянников Отрадная, Краснодарский Край
Вопрос http://www.parkflyer.ru/blogs/view_entry/11350/  Подключение регулятора к плате0
Подключение регулятора к плате011 сентября 2015 года в 14:01 | Кирилл Герман Гатчина
Вопрос http://www.parkflyer.ru/blogs/view_entry/12400/ Нужна помощь в настройке квадрокоптера029 ноября 2015 года в 18:22 | Кирилл Киблер Москва
Вопрос http://www.parkflyer.ru/blogs/view_entry/12836/ 













- Аккумуляторы и зарядники
- Сборка
- Самолёты
- Все самолеты
- Durafly Aircraft
- Avios RC Aircraft
- Kingcraft RC Aircraft
- H-King RC Aircraft
- Ready-To-Fly (RTF)
- Plug-N-Fly (PNF)
- Almost Ready To Fly (ARF)
- Запчасти для ремонта
- Системы стабилизации полета
- Для новичков
- Склей и лети
- Парковые модели
- Летающее крыло/треугольное крыло
- Самолеты 3D
- Масштабные копии
- Спортивные и пилотажные модели
- FPV модели
- Военные самолеты
- Самолеты с импеллером
- Планеры
- ДВС самолеты
- Метательные планеры
- Огромные самолеты
- Планера для горных склонов
- Бипланы и трипланы
- Комнатные самолеты
- Самолеты из бальзы
- Гидросамолеты
- Модели для ночных полетов
- Композитные модели
- Вырезанные лазером наборы
- Декоративно-тренировочные модели
- Кордовые модели
- Diecast Planes
- Дроны
- Полёты по камере
- Автомодели и мотоциклы
- Камеры
- Серво и радиоуправление
- Системы питания
- 3D печать, роботы
- Судомодели
- Вертолеты
- Модели поездов
- Lifestyle
- Спецпредложения
- Bargain Bin
Чтобы общаться и совершать покупки необходимо зарегистрироваться.
Это просто и займёт всего одну минуту.
Спасибо за регистрацию!
Для подробностей, наведите курсор на одну из картинок.
| Удаленные товары | |||||||
| Очистить | |||||||
Продолжение проблем следует, после всего ниже указанного я прошил плату маховий все заработало квадр взлетелнеустойчиво да это и не важно если чесно потом убил пол ночи переустановил винду на компе установил за ново все дрова все заработало флеш тул заработал прошил на мегапират мишен планер увидел но при подключении питания моторы издают звек пи через 10сек опять пи и не инициализируется регуляторы че делать газ не в инверти
И залить в неё как и в эту можно или Мегапирата или Мильтивии.
А flashка на плате второй версии есть однозначно, у меня платы обеих версий и некоторый опыт работы с ними.
P.S. А PPM-декодер, помоему, можно включить и на плате первой версии - микроконтроллер на обеих платах один и тотже..
Просто на криусовской плате (то бишь V2) есть отдельный пин для подключения ППМ. И раскодированием занимается программа (как вы говорите, а я просто не знаю, и не подключал никогда по ППМ эту плату) А на АРМ этим занимается отдельная маленькая мега, которой к слову, меняют программку. Если замкнуть на АРМ перемычкой сигнальные выводы 2и3 канала, то первый канал работает в режиме СРРМ. Как это реализовано на Криусовском контроллере - я не знаю.
Тоже прошу прощения за своё занудство. )))
1.
Платы Multiwii and Megapirate AIO Flight Controller (обсуждаемая здесь) и CRIUS AIOP V2.0 (на которую ссылается Андрей Бовырин) различаются как минимум наличием flash-памяти и, возможно, барометром (MS5611-01BA03 и MS5611-01BA01).
2.
PPM-декодер - это программный модуль в составе прошивки MegaPirat, который может работать как на одной, так и на другой плате. Его включение/выключение производится в файле libraries\AP_HAL_MPNG\RCInput_MPNG.cpp в соответствии с разделом RC Input type configuration документации на MegaPirat (http://docs.megapirateng.com/documentation/general_configuration#rc_input_type_configuration).
Для платы CRIUS упоминается еще и режим CPPM, недоступный для платы HobbyKing (покрайней мере так заявлено в документации MegaPiratа). Что это такое - я не знаю (кто в курсе - помогайте).
На обеих платах имеется 8 "цифровых" входов. В режиме PPM используется только один из них, а в режиме PWM все восемь. Выбор режима PPM или PWM производится исходя из типа вашего приёмника.
Нажимаю на его ссылку и вижу:
А Криус АИОП - находится на RCTimer'е, и выглядит вот так:
Несколько разные платы...
ОЙ, вначале ветки ссылка на другую плату.... Ладно пускай остается ответ.
А различия вы описали правильно.
Режим СРРМ - это суть РРМ, вы тоже его описали (зависит не от типа приемника, а от способа передачи информации по каналам с приемника, например этот приемник - может выдавать как СРРМ, так и PWM - то есть приемник один и тот же, а способы кодировки каналов - разные). Просто у Криусовской платы есть ещё одна маленькая Мега, которая РРМ раскидывает по каналам (чип слева снизу, левее FTDI), благодаря чему появился отдельный пин на входе, подписанный PPM.
А в файле RCInput_MPNG.cpp возможно настраивается именно "программное" раскидывание сигнала РРМ на платах не имеющих дополнительной маленькой меги (вот тут я могу врать).
Прошу прощения за некропостинг.
хоче по благодарить всех за помощь большое вам спасибо!!!
Изадать еще один вопрос, вот я все прошил откалибровал настроил собрал взлетел и все произошла авто посадка как при разряде акка и все больше невзлетает точнее подключаю питание и регули не инициальзируются приемник поменял все перекалибровал они здают звек пи секунд 10 опять пи и так бесконечно что делать не знаю куда лезть а так на прямую от приемника все работает прошивка мегамират.
Подключите к МП, сходите на вкладку с калибровкой радио - проверить как и какие каналы меняются при движении стиков (и каких).
Так же на первой вкладке надо посмотреть, что пишет МП при попытке арминда коптера (только не вздумайте взлетать с проводом).
а с газом все в поряде думаю я же взлетел а сел он сам подхожу а регули пи сек 10 пи и все не могу не откалибровать не на что не реагирует явычитал на http://forum.rcdesign.ru/ может прошивка слетела прошить не пробовал комп чето винда здохла а на ноуте MegaPirateNG-FlashTool пишет это че делать не знаю
У вас сам контроллер виндой определяется? Как отдельный COM порт встает?
спасибо!!!
Попробуйте ещё раз залить Мегапиратовскую прошивку, указав правильно параметры в флештуле.
Возможно, вам придется очистить EEPROM. Надо сначала загрузить МП, на вкладке terminal нажать connect (внимание, не в начале, а на вкладке терминал), потом setup - энтер, потом erase - энтер. Кнопка Disconnect. Вроде там ещё контроллер перезагружать надо, сейчас не помню, почитайте что напишется в командной строке.
После этого опять через флештул залить правильную версию мегапирата.
У меня главный вопрос - КАК прошивка слетела прямо в полете? Возможно, у вас что-то неправильно организовано по питанию.
Ещё рабочий вариант - возможно сгорел стабилизатор на 3,3 вольта.