Самодельный квадрактоптер.


Сейчас в сети существует большое количество тем по постройке квадракоптеров, на мой взгляд они хорошие но не полные и новичок сталкивается с большими трудностями собирая информацию по всему интернету. Я постараюсь здесь собрать, обобщить и по возможности в подробностях рассказать о постройке квадракоптера, удастся ли мне это или нет – судить вам.
1. Чертеж квадракоптера.
Тут есть много различных чертежей коптеров. Но я остановился на таком.
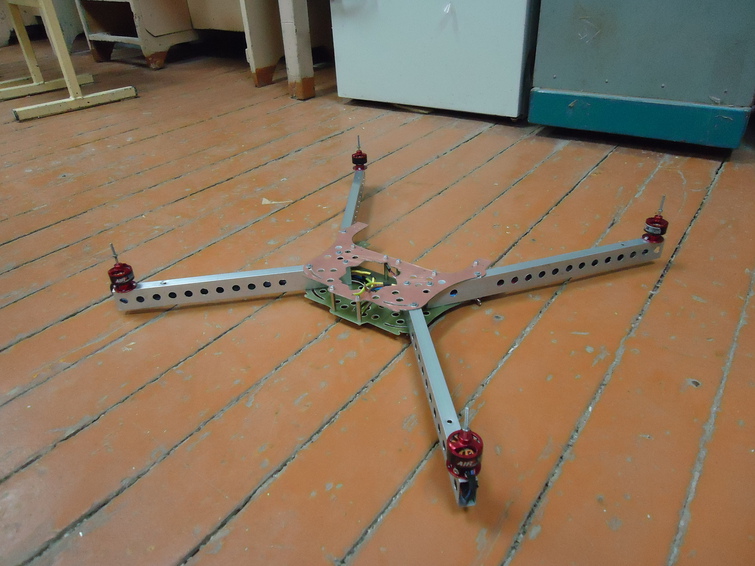
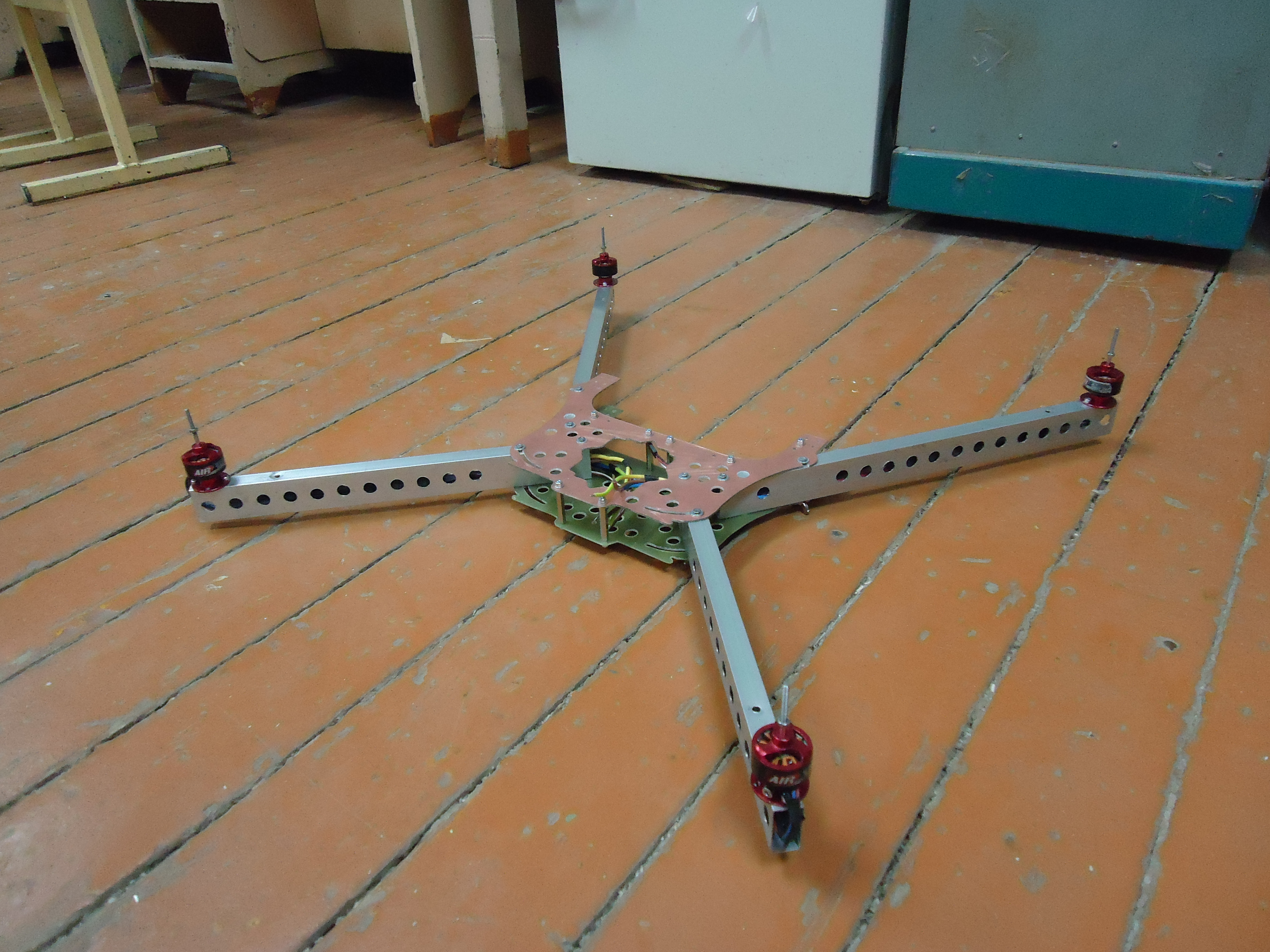
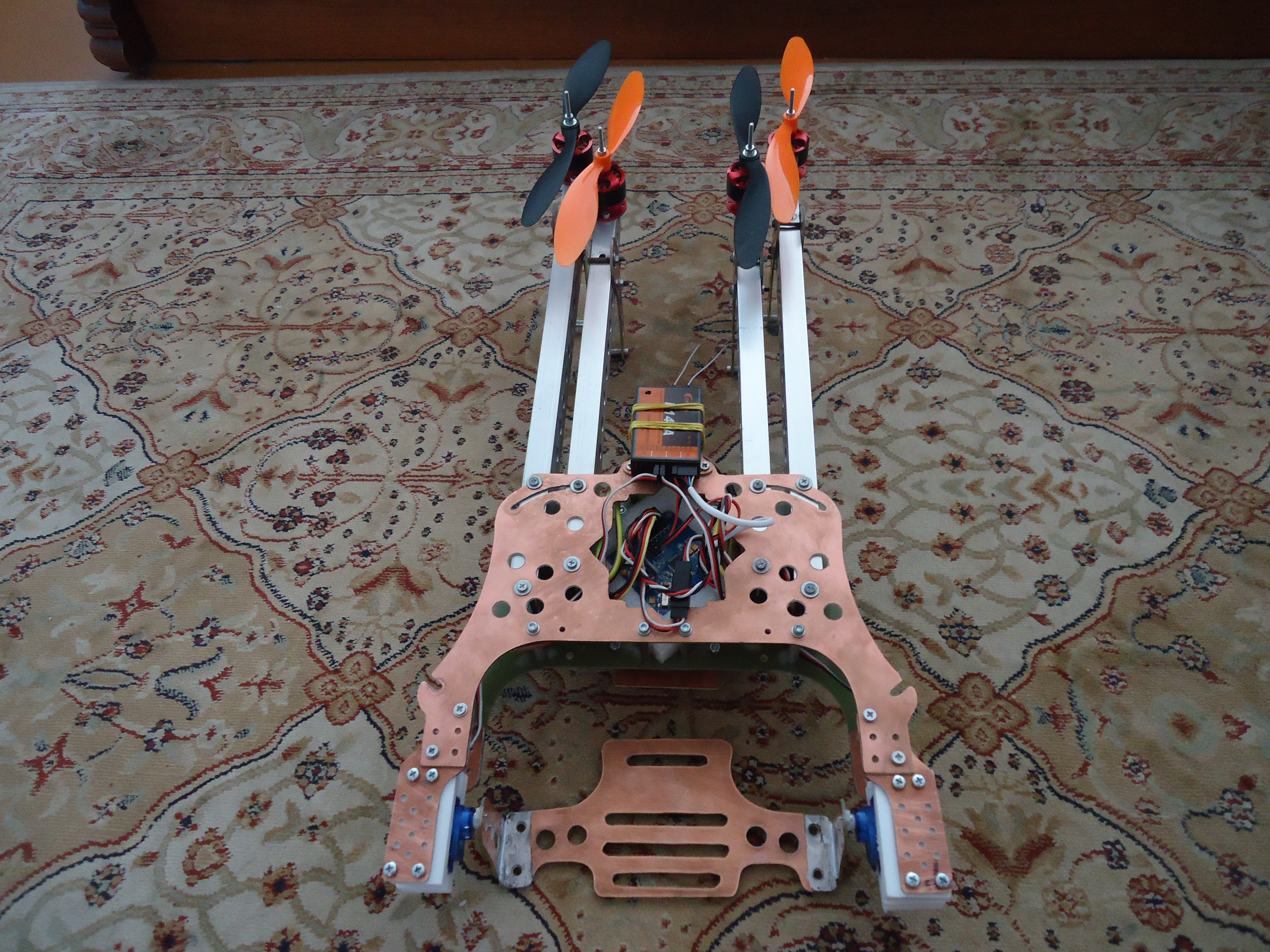
Во-первых, лучи квадракоптера складываются, что очень удобно при перевозке.
Во-вторых, удачное размещение пишущей камеры.
В - третьих, диагональ между лучами 700мм.
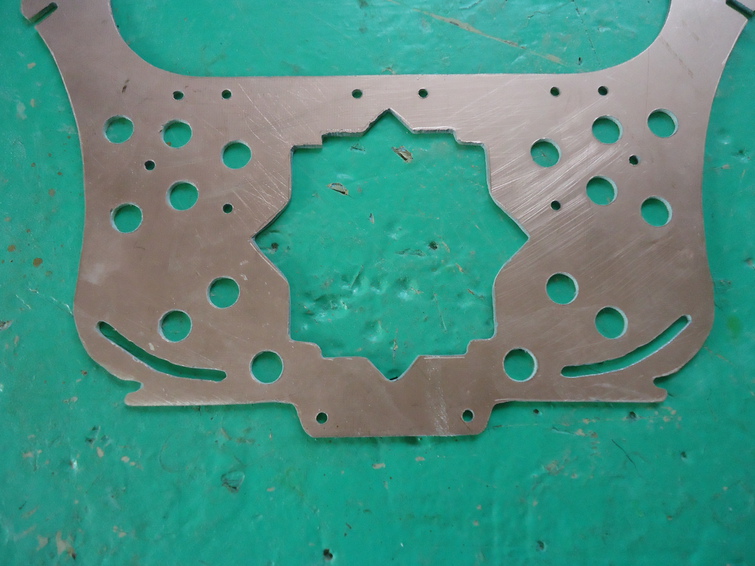
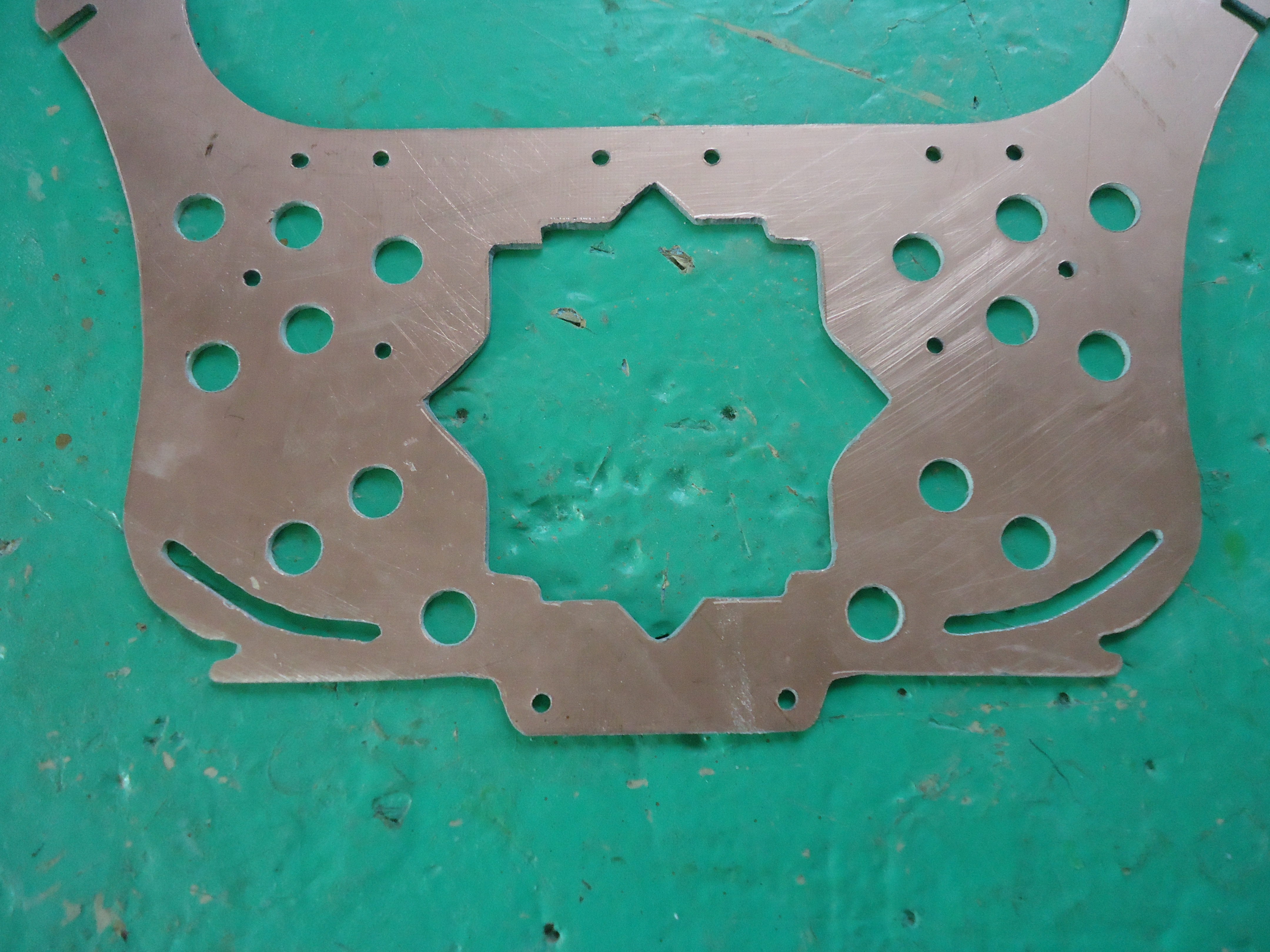
Чертеж рамы
2.Электроника.
Главная плата управления (мозги). Я использовал такие, хотя крайне их и не советую, лучше взять другие. Например такие.
Регуляторы у меня были такие.
Двигатели такие.
Винты нужны такие (винтов сразу берите много!)
И ваша аппаратура радиоуправления.
Сразу что касается регуляторов, их мы будем перепрошивать.
3. Перепрошивка регуляторов.
Для чего это нужно? Перепрошитые регуляторы работают в разы быстрее, а значит квадракоптер быстрее будет стабилизироваться и лучше откликаться на команды.
Так как регуляторы будут спрятаны в лучи, лучше их прошить перед уборкой в лучи.
Процесс прошивки не сложный, но требует определенных навыков паяния.
Во-первых читаем внимательно статью http://forum.rcdesign.ru/blogs/43414/blog15262.html
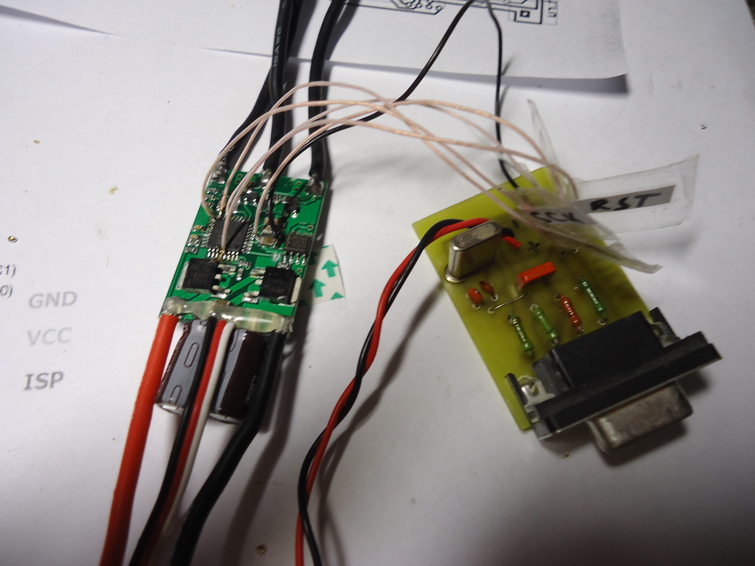
Во-вторых, собираем программатор, тут вам раздолье, либо купить готовый USBasp AVR программатор для процессоров ATMEL.
либо собирать самому, я остановился на втором варианте http://smasteri.at.ua/publ/ehlektronika/programmator_dlja_atmega/9-1-0-212
В-третьих, скачиваем софт. Я использовал Ponyprog2000 с русским языком
Скачиваем, например, от сюда: http://www.sc-gig.ru/load/proshivki_i_proshivateli/ponyprog2000rus/2-1-0-4
Настраиваем программу для работы, для этого подключаем программатор и заходим в Установки – настройка оборудования, выбираем последовательный порт-JDM API-СOM 1 жмем Проверка. Затем Установка –калибровка. Вот и все.
Теперь надо выбрать прошивку, на сайте
http://wiki.openpilot.org/display/Doc/RapidESC+Database
выбираем регулятор который у вас, рядом написана необходимая прошивка. Эти прошивки лежат в архиве, скачиваем. (если вы используете такие же регуляторы, то прошивка tp.hex)
Прошивки.
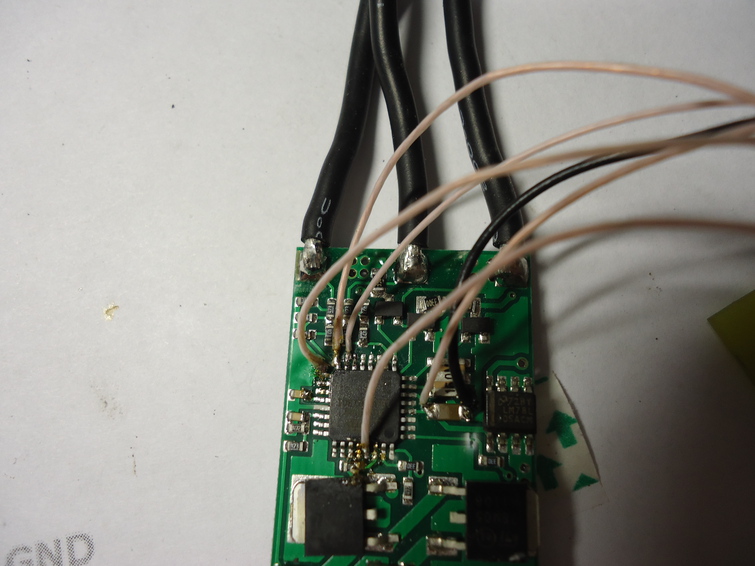
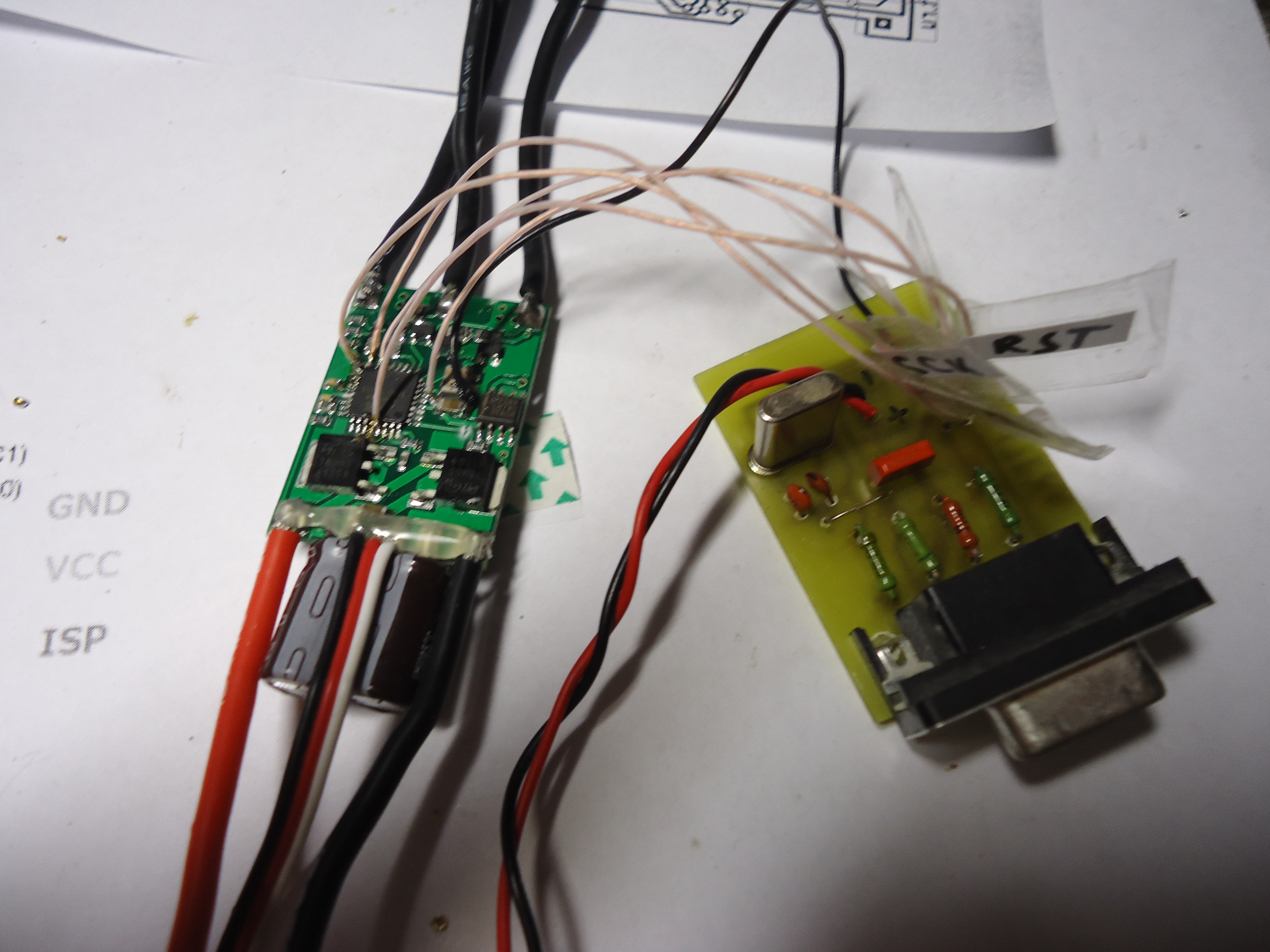
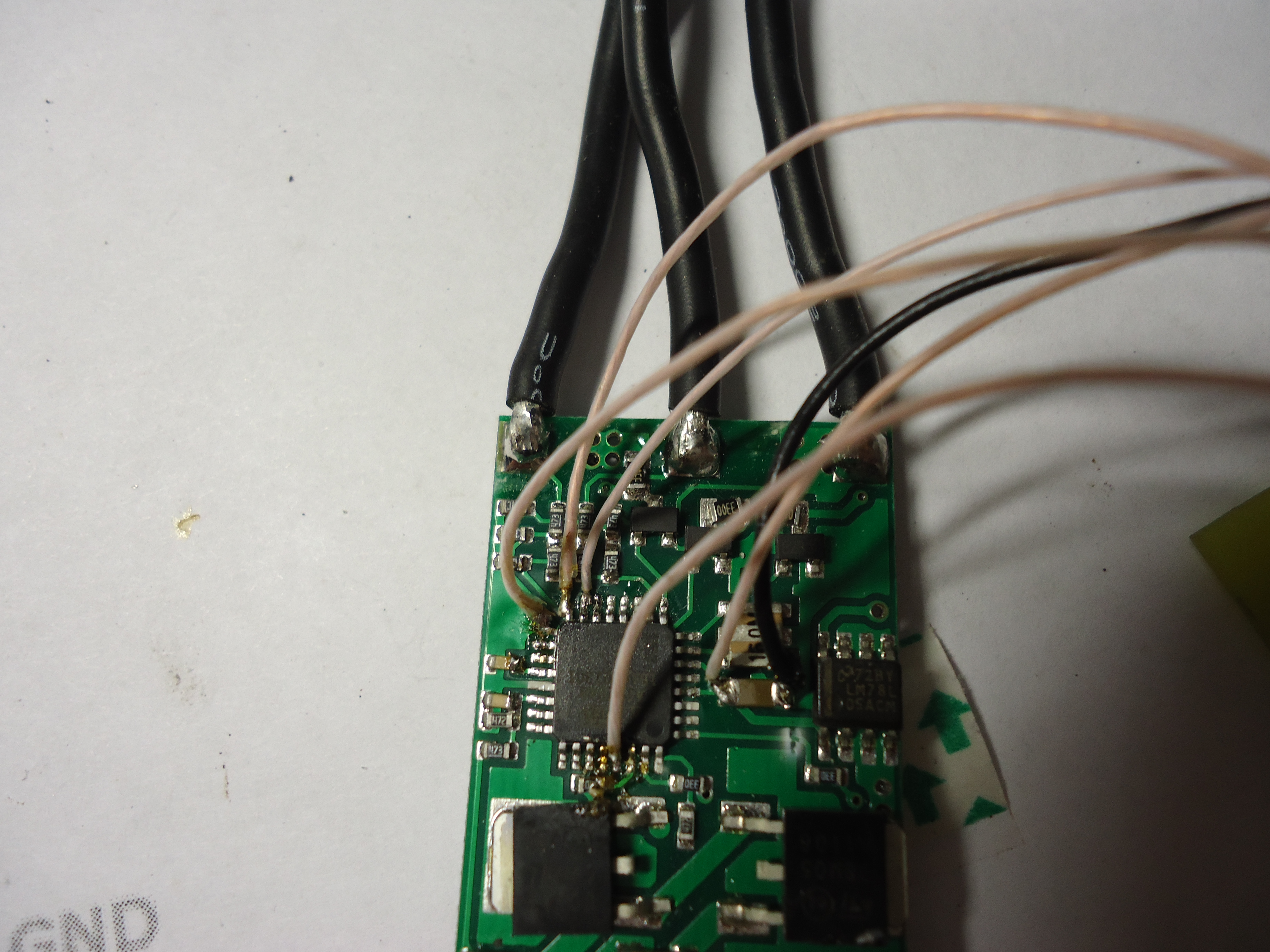
Теперь самый ответственный момент! Как можно аккуратнее подпаиваем провода к ножкам контроллера. Тут главное не перегреть контроллер и не соединить две соседние ножки вместе – иначе программа выдаст ошибку.
Подключаем программатор, подаем на него питание, заходим в понипрог2000, выбираем контроллер АтМега 8. Считываем прошивку. Если прошивка считалась, то поздравляю вас, вы все правильно сделали! На всякий случай, считываем фюзы, для этого нажимаем на значок замочка – и считать. Берем листочек и записываем эти фюзы (для чего это? Когда я усаживал в террмоусадку прошитый контроллер, я его перегрел и сжег, купил новую атмегу, перепаял, прошил, но двигатель не работал, оказалось все дело во фьюзах, прошил фьюзы – все заработало, поэтому их лучше сразу знать).
Теперь просто открываем нужную прошивку в понипрог и шьем контроллер. Если все прошло успешно – появится сообщение. Все отключаем, отпаиваем провода, и проверяем регулятор. Для это подключаем его к двигателю, аккумулятору, приемнику, включаем. Двигатель должен пискнуть, даем полный газ – двигатель пискнет еще раз, газ в ноль, двигатель пропищит, теперь когда даем газ – двигатель должен заработать (у разных прошивок разные писки, поэтому тут уже все индивидуально). Если все заработало – промазываем радиатор термопастой и загоняем регуль в термоусадку.
Так поступаем со всеми регуляторами.
Муторно, долго, НО ОНО ТОГО СТОИТ!!!
4. Постройка рамы.
Начинаем постройку со сбора материалов.
Нам понадобится: алюминиевые профили (рекомендуют профили квадратного сечения я взял, какие нашел 30х15мм, толщина стенки 0,8мм), парочку листов текстолита (в радиомагазине взял 2 листа односторонефольгирофанного стеклотекстолита), много болтов, гаечек, шайбочек, алюминиевые трубочки двух видов: в которую бы свободно входил болт М3 и вторая, в которую болт М3 закручивался бы.
Распечатываем шаблоны рамы, вырезаем и приклеиваем их клеем карандашом к тестолиту.
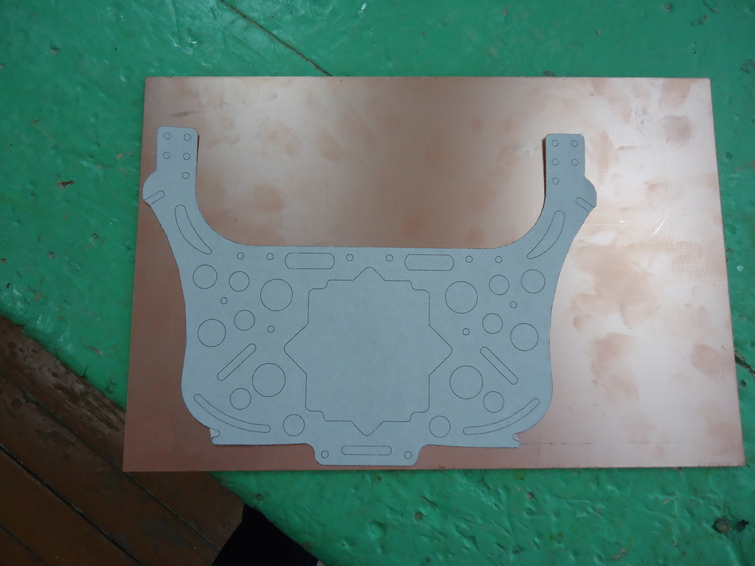
По контуру вырезавем, не касаясь шаблона. Нам надо две штучки – верхнее основание и нижнее.
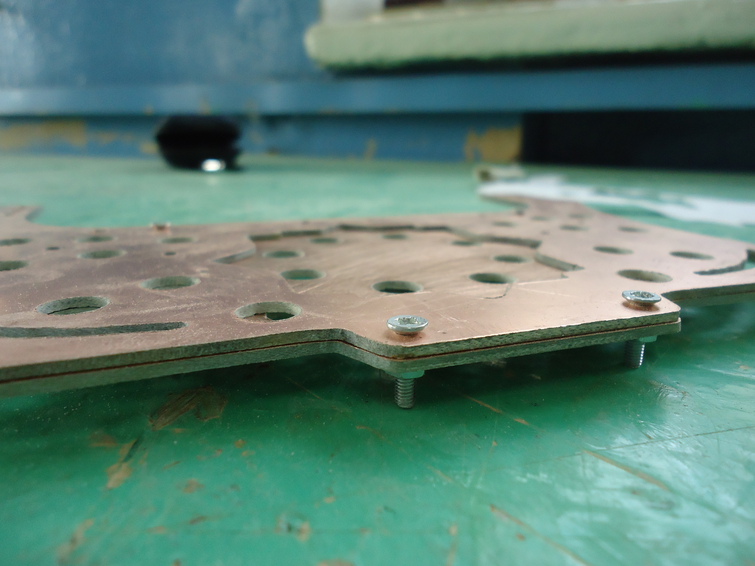
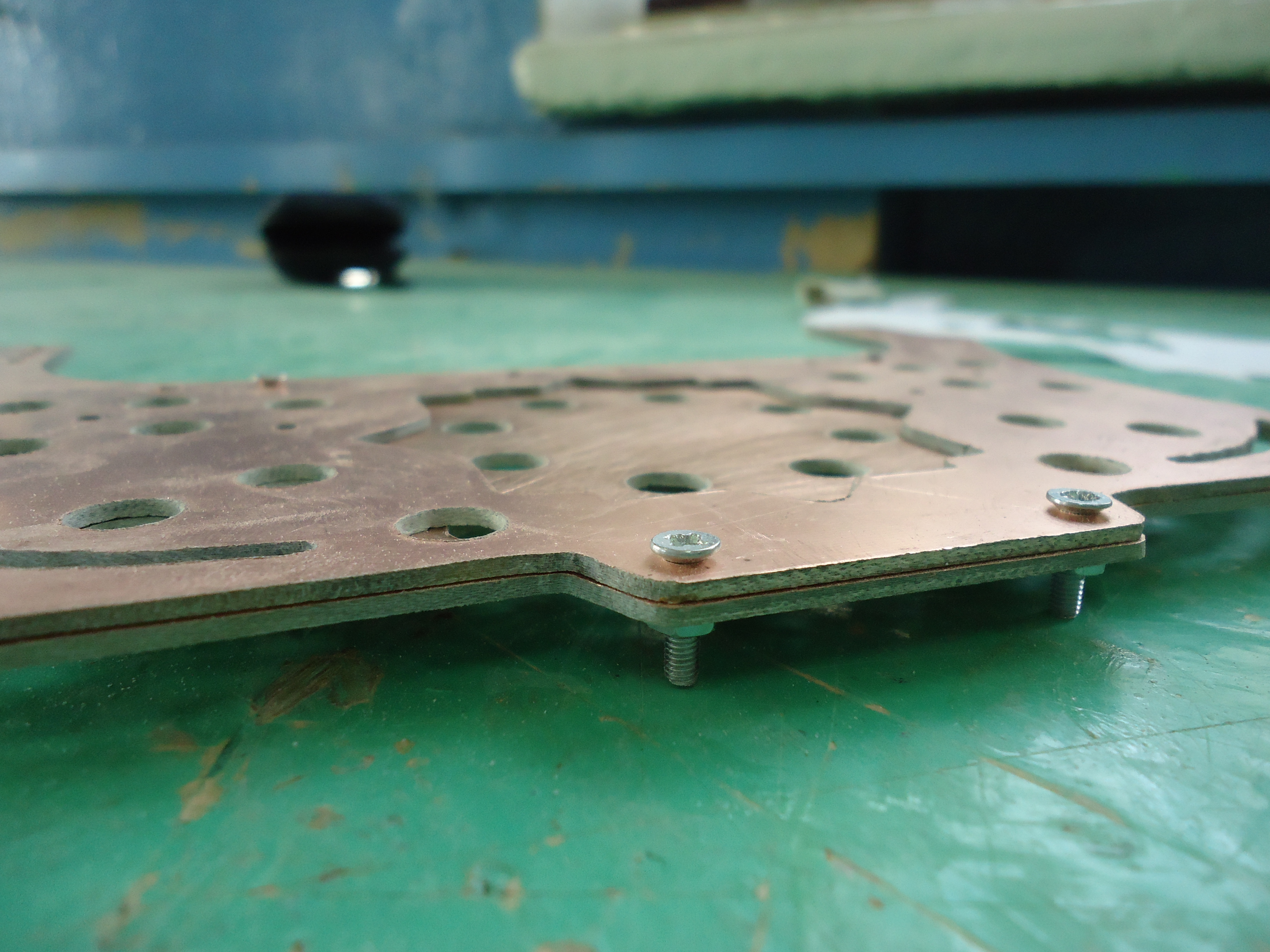
Сверлим общие дырочки и срепляем верхнее оснвоание с нижним болтиками. Далее обрабатываем шапильником, шкуркой, кому как удобно, все края. Просврливаем дырочки в поворотных вырезах и дорабатываем их надфилем.

Дальше разьединяем наши основания и делаем оставшиеся дырочки и прорези для облегчения.
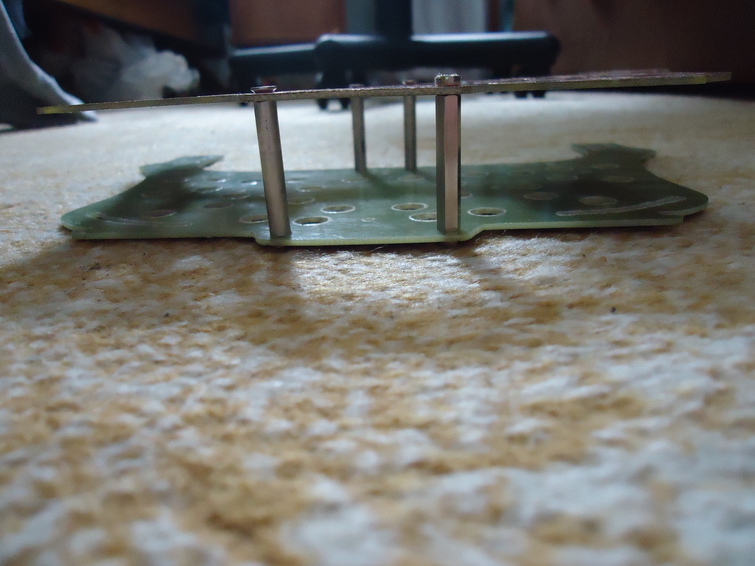
Теперь нужны трубочки, в которые мы могли бы закрутить болтики М3. Высота луча 30 мм, соответственно и высота трубочек должна быть 30 мм. У меня стоит шесть штук таких. (слева самодельная, справа покупная)
Дальше делаем лучи. Надо сделать два луча длиной 300 мм и два луча длиной 350мм.
Размечаем и сверлим дырочки для облегчения.


Размечаем на луче дырочки, через которые будут проходить болтики для крепления к раме, сверлим.

Теперь можно прикручивать двигатели и соединять их с регуляторами. Перед установкой регулятора внутрь советую удленить силовые провода, если это нужно, и проверить в какую сторону вращается двигатель, так как доставать регулятор будет неудобно.
Можно прикручивать стойки между верхним и нижним основанием, крепить лучи.
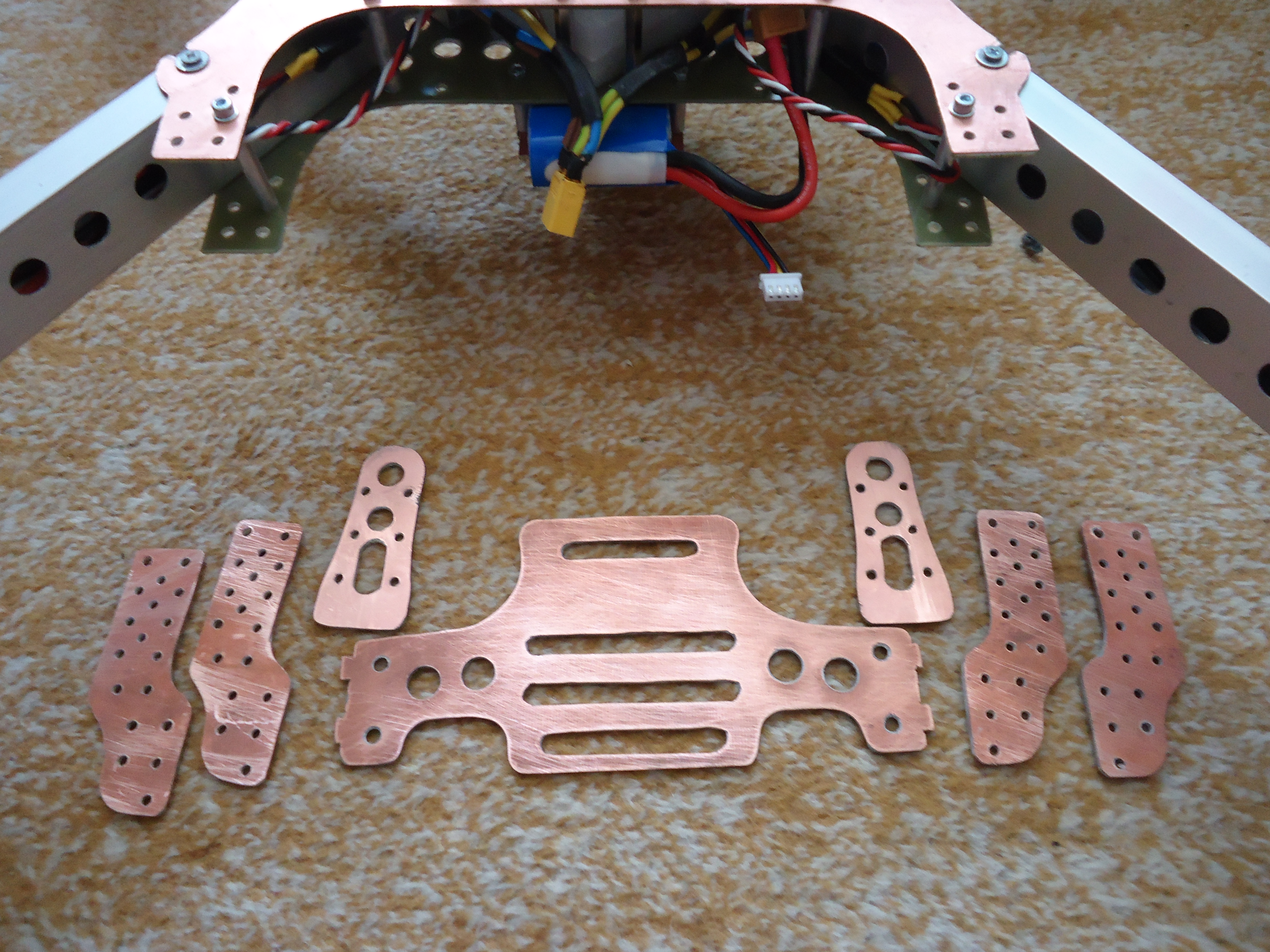
Изготавливаем ножки.
Сначала так же по грубому выпиливаем из текстолита, соединяем их все вместе и начинаем обрабатывать, в итоги получаем одинаковые, ровные ножки.


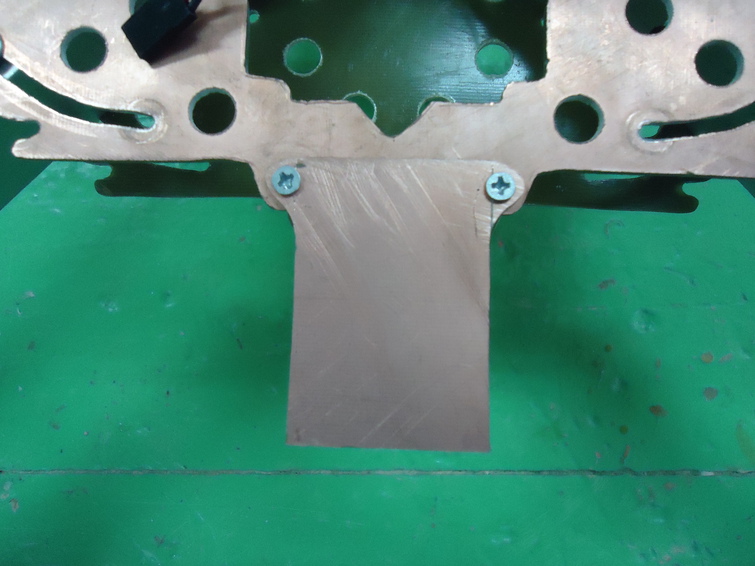
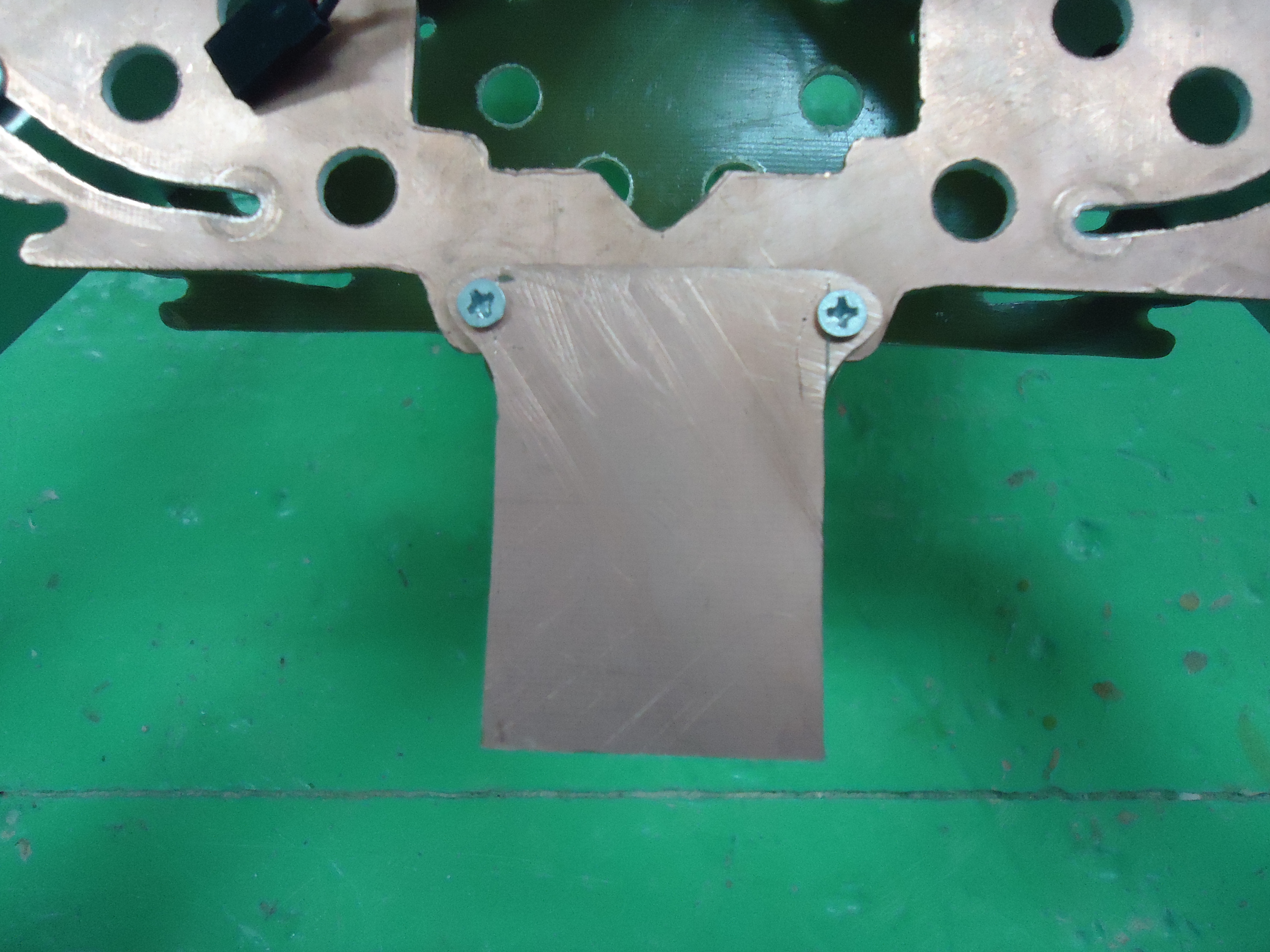
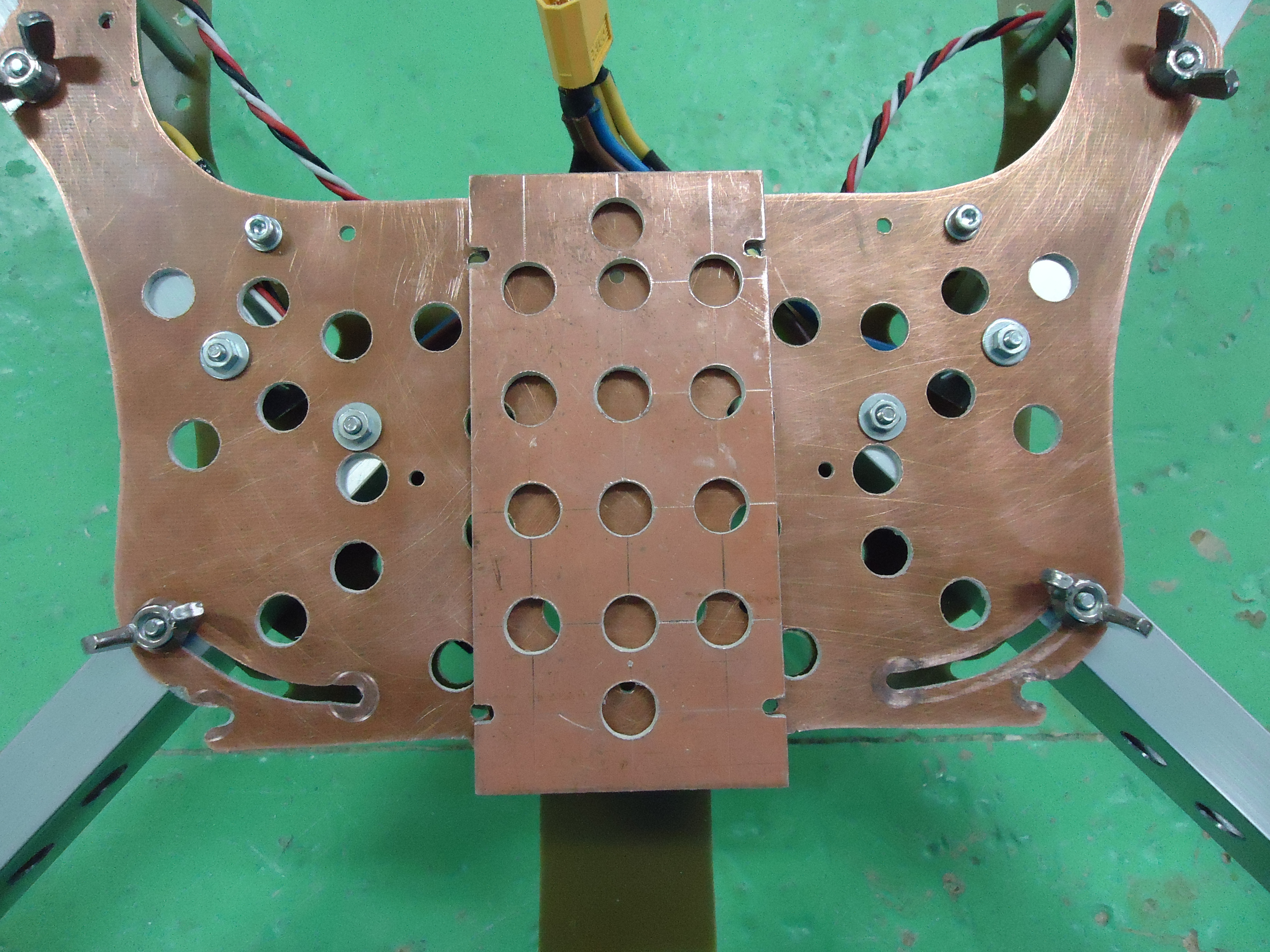
Дополнительно необходимо сделать площадочку для приемника и аккумулятора. Тут все зависит от вашей фантазии, я сделал так.


5. Изготовление подвеса.
Думаю тут не должно возникнуть проблем, если вы сделали квадракоптер, для наглядности фотографии. Сервомашинка зажата в потолочку.

6.Облет.
Устанавливаем мозги во что нибудь мягкое, например в паралон, это нужно что бы вибрации от двигателей оказывали как можно меньший эффект на гироскопы в мозгах.
Проверяем еще раз что двигатели крутятся в нужную сторону. Если даем крен вперд – должны повысить обороты два задних двигателя и наоборот.
На аппаратуре устанавливаем двойные расходы на крен, тангаж на 50%. Если мозги такие как у меня, то двойные расходы курса не трогаем!!!! Иначе мозги не вклчатся.
Запускать квадракоптер первый раз необходимо на большой территории, я запускал в на площадке в садике.
Перед запускам советую подложить под ножки коптер что-нибудь мягкое, так как посадки буду жесткими!
Вот вроде бы и все, будут вопросы – задавайте в комментариях.
Мягких посадок!
1. Чертеж квадракоптера.
Тут есть много различных чертежей коптеров. Но я остановился на таком.
Во-первых, лучи квадракоптера складываются, что очень удобно при перевозке.
Во-вторых, удачное размещение пишущей камеры.
В - третьих, диагональ между лучами 700мм.
Чертеж рамы
2.Электроника.
Главная плата управления (мозги). Я использовал такие, хотя крайне их и не советую, лучше взять другие. Например такие.
Регуляторы у меня были такие.
Двигатели такие.
Винты нужны такие (винтов сразу берите много!)
И ваша аппаратура радиоуправления.
Сразу что касается регуляторов, их мы будем перепрошивать.
3. Перепрошивка регуляторов.
Для чего это нужно? Перепрошитые регуляторы работают в разы быстрее, а значит квадракоптер быстрее будет стабилизироваться и лучше откликаться на команды.
Так как регуляторы будут спрятаны в лучи, лучше их прошить перед уборкой в лучи.
Процесс прошивки не сложный, но требует определенных навыков паяния.
Во-первых читаем внимательно статью http://forum.rcdesign.ru/blogs/43414/blog15262.html
Во-вторых, собираем программатор, тут вам раздолье, либо купить готовый USBasp AVR программатор для процессоров ATMEL.
либо собирать самому, я остановился на втором варианте http://smasteri.at.ua/publ/ehlektronika/programmator_dlja_atmega/9-1-0-212
В-третьих, скачиваем софт. Я использовал Ponyprog2000 с русским языком
Скачиваем, например, от сюда: http://www.sc-gig.ru/load/proshivki_i_proshivateli/ponyprog2000rus/2-1-0-4
Настраиваем программу для работы, для этого подключаем программатор и заходим в Установки – настройка оборудования, выбираем последовательный порт-JDM API-СOM 1 жмем Проверка. Затем Установка –калибровка. Вот и все.
Теперь надо выбрать прошивку, на сайте
http://wiki.openpilot.org/display/Doc/RapidESC+Database
выбираем регулятор который у вас, рядом написана необходимая прошивка. Эти прошивки лежат в архиве, скачиваем. (если вы используете такие же регуляторы, то прошивка tp.hex)
Прошивки.
Теперь самый ответственный момент! Как можно аккуратнее подпаиваем провода к ножкам контроллера. Тут главное не перегреть контроллер и не соединить две соседние ножки вместе – иначе программа выдаст ошибку.
Подключаем программатор, подаем на него питание, заходим в понипрог2000, выбираем контроллер АтМега 8. Считываем прошивку. Если прошивка считалась, то поздравляю вас, вы все правильно сделали! На всякий случай, считываем фюзы, для этого нажимаем на значок замочка – и считать. Берем листочек и записываем эти фюзы (для чего это? Когда я усаживал в террмоусадку прошитый контроллер, я его перегрел и сжег, купил новую атмегу, перепаял, прошил, но двигатель не работал, оказалось все дело во фьюзах, прошил фьюзы – все заработало, поэтому их лучше сразу знать).
Теперь просто открываем нужную прошивку в понипрог и шьем контроллер. Если все прошло успешно – появится сообщение. Все отключаем, отпаиваем провода, и проверяем регулятор. Для это подключаем его к двигателю, аккумулятору, приемнику, включаем. Двигатель должен пискнуть, даем полный газ – двигатель пискнет еще раз, газ в ноль, двигатель пропищит, теперь когда даем газ – двигатель должен заработать (у разных прошивок разные писки, поэтому тут уже все индивидуально). Если все заработало – промазываем радиатор термопастой и загоняем регуль в термоусадку.
Так поступаем со всеми регуляторами.
Муторно, долго, НО ОНО ТОГО СТОИТ!!!
4. Постройка рамы.
Начинаем постройку со сбора материалов.
Нам понадобится: алюминиевые профили (рекомендуют профили квадратного сечения я взял, какие нашел 30х15мм, толщина стенки 0,8мм), парочку листов текстолита (в радиомагазине взял 2 листа односторонефольгирофанного стеклотекстолита), много болтов, гаечек, шайбочек, алюминиевые трубочки двух видов: в которую бы свободно входил болт М3 и вторая, в которую болт М3 закручивался бы.
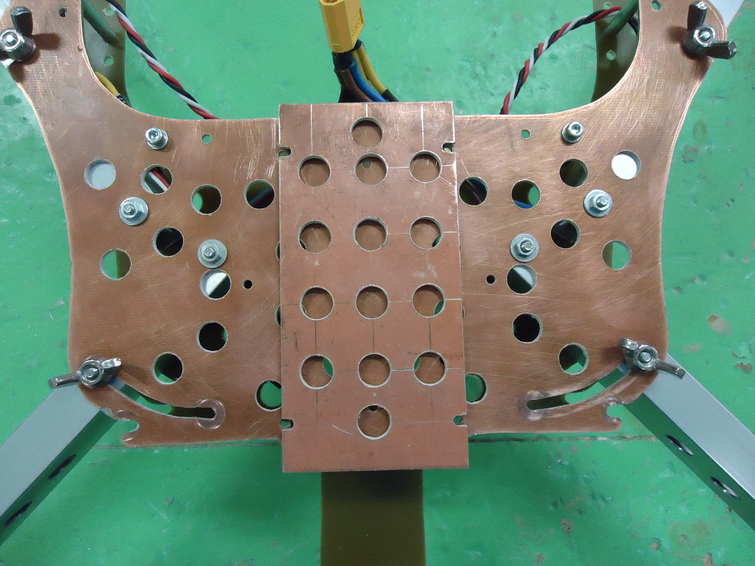
Распечатываем шаблоны рамы, вырезаем и приклеиваем их клеем карандашом к тестолиту.
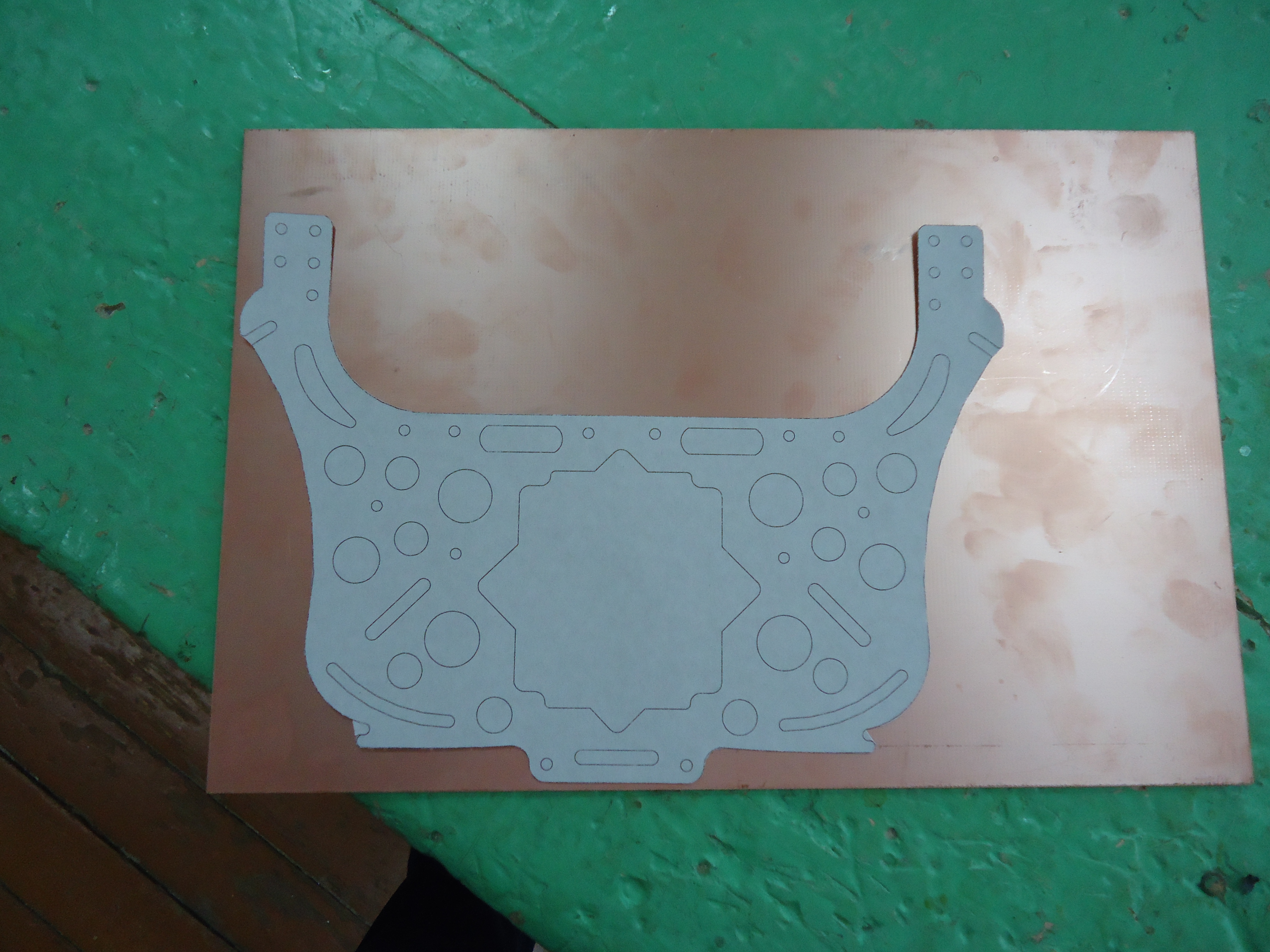
По контуру вырезавем, не касаясь шаблона. Нам надо две штучки – верхнее основание и нижнее.
Сверлим общие дырочки и срепляем верхнее оснвоание с нижним болтиками. Далее обрабатываем шапильником, шкуркой, кому как удобно, все края. Просврливаем дырочки в поворотных вырезах и дорабатываем их надфилем.

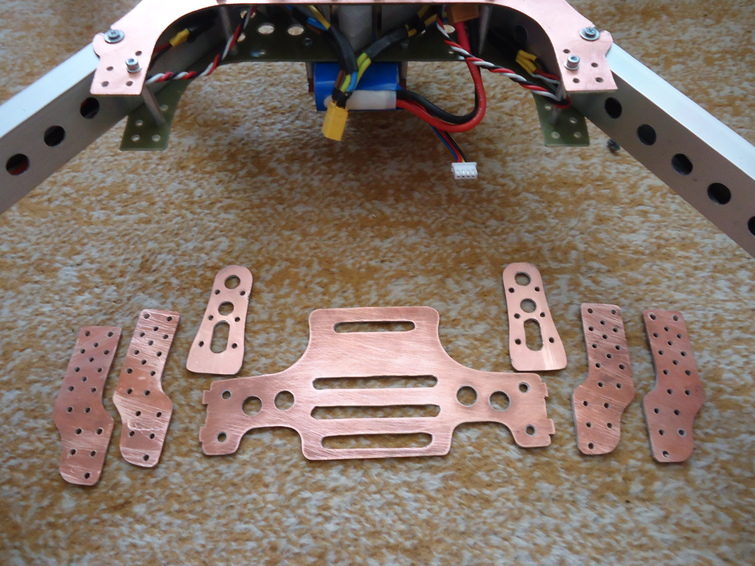
Дальше разьединяем наши основания и делаем оставшиеся дырочки и прорези для облегчения.
Теперь нужны трубочки, в которые мы могли бы закрутить болтики М3. Высота луча 30 мм, соответственно и высота трубочек должна быть 30 мм. У меня стоит шесть штук таких. (слева самодельная, справа покупная)

Дальше делаем лучи. Надо сделать два луча длиной 300 мм и два луча длиной 350мм.
Размечаем и сверлим дырочки для облегчения.


Размечаем на луче дырочки, через которые будут проходить болтики для крепления к раме, сверлим.

Теперь можно прикручивать двигатели и соединять их с регуляторами. Перед установкой регулятора внутрь советую удленить силовые провода, если это нужно, и проверить в какую сторону вращается двигатель, так как доставать регулятор будет неудобно.
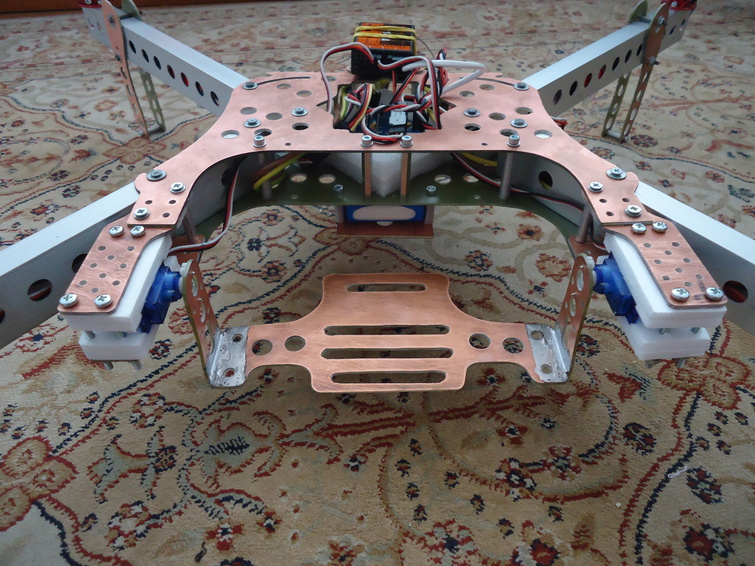
Можно прикручивать стойки между верхним и нижним основанием, крепить лучи.
Изготавливаем ножки.
Сначала так же по грубому выпиливаем из текстолита, соединяем их все вместе и начинаем обрабатывать, в итоги получаем одинаковые, ровные ножки.


Дополнительно необходимо сделать площадочку для приемника и аккумулятора. Тут все зависит от вашей фантазии, я сделал так.


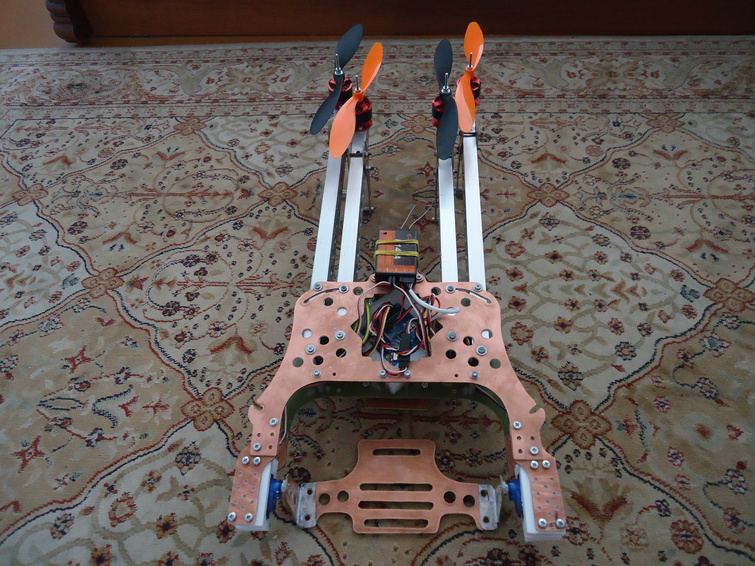
5. Изготовление подвеса.
Думаю тут не должно возникнуть проблем, если вы сделали квадракоптер, для наглядности фотографии. Сервомашинка зажата в потолочку.


6.Облет.
Устанавливаем мозги во что нибудь мягкое, например в паралон, это нужно что бы вибрации от двигателей оказывали как можно меньший эффект на гироскопы в мозгах.
Проверяем еще раз что двигатели крутятся в нужную сторону. Если даем крен вперд – должны повысить обороты два задних двигателя и наоборот.
На аппаратуре устанавливаем двойные расходы на крен, тангаж на 50%. Если мозги такие как у меня, то двойные расходы курса не трогаем!!!! Иначе мозги не вклчатся.
Запускать квадракоптер первый раз необходимо на большой территории, я запускал в на площадке в садике.
Перед запускам советую подложить под ножки коптер что-нибудь мягкое, так как посадки буду жесткими!
Вот вроде бы и все, будут вопросы – задавайте в комментариях.
Мягких посадок!













Скажите вес большой, да, но и ,,размах,, не маленький, диагональ 700 мм.
+ Вставлю свои пять копеек
..советую с винтами сделать следущее, чтоб вдруг не отстрелился в воздухе. Контрагайка хорошо конечно, но винт прокручивается на оси вдобавок.
Чем плох первый контроллер управления ? Чеми они отличаются между собой ?
Обязательно ли перепрошивать самолетные регули ? Я заказал готовый коптер , не знаю какие там регули придут и будет ли под них прошивка :(
Если вы заказали готовый коптер, то возможно и не надо будет перепрошивать регуляторы.
Довно хочу освоить коптеры, да все потолочка не отпускает!
Молодчина,+
И есть вопрос если брать регуляторы плюш 30А версия прошивки 3,1, как они, надо что нибудь делать или они и так норм!
как новые придут отпишись пожалуйста.
И я имею в виду не только модель! Статья! Статья, ваша статья пример!
Последовательные фото сборки, предыстория, инструкции, чертежи!
Всё это ГЛАВНЫЕ составляющие ОТЛИЧНОЙ статьи!
+ ВАМ!