Тренеровка пространственному ориентированию.
Для меня пространственное ориентирование по FPV весьма сложная вещь. Для того что-бы научится летать смотря в экран или в очки сменив визуальный контроль на FPV пришлось изрядно потренироваться преодолевая свои страхи разбить технику, или что более страшно, кого-нибудь покалечить. К технике я отношусь весьма щепетильно так как лишних денег нет, а запчасти достаточно дорогостоящее удовольствие.
Чисто физически, экран не может передать ощущение дальность до объекта, та как нет эффекта стереоскопичности. А в широкоугольную камеру объекты, с непривычки, кажутся дальше, чем они есть. Это как на зеркалах авто.

Для того, чтобы не быть привязанным к дальности для объекта, я стараюсь задавать курс коптера на свободное пространство, подруливая для компенсации поступательного движения креном. Получается, что-то вроде координированного разворота.
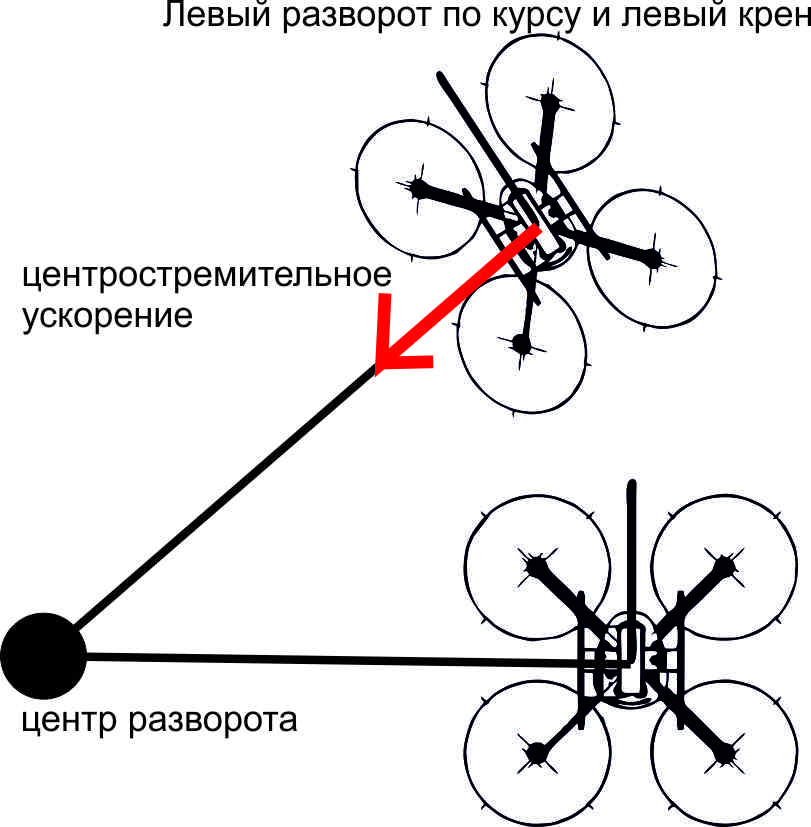
Такой манёвр прост для осознания, так-как левая и правая ручка двигаются в одном направлении, только в зависимости от ситуации с разной амплитудой.


Если хорошо научится такому развароту то в итоге будет получатся как на 6:47 этого видео (но не так хорошо как выполняет это автоматика в этом видео)
Кстати очень интересное неплохое видео для осознания сути управления коптером.
Для тренировок я построил коптер, который описан в данном видео, и был уже ранее выложен и назывался «Шустрый суслик». С «шустрым» я конечно погоричился за, что и получил изрядное количество минусов.
Самым интересным и сложным в данных полётах это изучение и запоминание местности. Так-как для более плавного точного и красивого полёта требуется предсказывать все свои дальнейшие действия. А после изучения местности требуется выдержка, чтобы не переборщить. В любом случае тренировки улучшают влётанность, ощущение аппарата, спокойствие и выдержку.
До данных тренировок были попытки полёта по фпв на самолёте и коптере. Попытки были удачливые, но оба аппарата я не чувствовал как следует, не было уверенности в своих действиях.
пример FPV полётов до тренеровок.
Сейчас для меня это очень безрассудное хоть и прикольное видео.
Уверенность для любого человека - это очень важное состояние, от которого зависит исход любых его действий. Не уверенность в условиях малого опыта и непонятной ситуации может породить панику. Большая часть действий совершенных в панике являются не верными. Излишняя уверенность порождает халатность. Для любых полётов требуется соблюдать грань, быть полностью включённым в окружение и то, что ты делаешь.
Для контроля состояния коптера я использую iOSD NAZA (видео не моё)
Гирогоризонт позволяет ориентироваться в воздушном пространстве и учитовать ветер. Точка дом вслучае чего подскажет где он.
Датчик напряжения подскажет сколько примерно осталось летать. Незабываем что зависимость оставшей ёмкости зависит от напряжения не линейно. Очень важный для меня параметр это вертикальная скорость. так как удерживать высоту для меня сейчас самое сложное.
В видео есть пару моментов где я летаю вблизи людей, что ещё хуже на уровне головы. Это противоречит ТБ. С другой стороны такие моменты помогают научится избегать людей и животных, а также контролировать их и свои действия в сложившейся ситуации. Главным Образом стараюсь либо неподвижно зависнуть и ждать, либо удалится в более безопасное место.
Мне из за своей близорукости, приходится носить очки. Очки мешают надеть FPV очки, поэтому я предпочитаю использовать 10дюймовый экран, прикрученный к пульту.
Он позволяет переключиться с визуального контроля на FPV и обратно за максимально короткое время. Сложным переходом является обратный (с FPV на визуальный). Картинка в FPV очках Fat Shark мне не нравится. И для ФПВ хочу в дальнейшем приобрести что-то подобное

Также стоит серьёзный вопрос о смене видео канала очень зашумлённы в Петербурге 5.8 и 2.4 гГц
В качестве полётного контроллера использую NAZA v2. Режим выбираю удержание высоты «ATT». Есть у назы минус связанный с алгоритмом GPS. Было несколько случает когда коптер в режиме ATT пытался улететь сам не пойми куда. Оба раза был экстремально посажен.
Также был случай просадки батареи на Аппаратуре РУ из-за мороза -10C. Коптер перешел в ручной режим и был также экстремально посажен.
Был приятно удивлён, но рама выдержала все издевательства, единственное немного погнуты лучи, что не является особо критичным.
Следующим этапом для меня будет изучение ручного режима управления.













С людьми поаккуратнее! Видел как минимум один пролёт над бабушкой. Представьте, в это время вы задеваете ветки и коптер падает на бабушку с 3-5 метровой высоты. Килограмм весит ведь? Плюс пропеллеры могут крутиться...
Зачем вам эти проблемы? Летайте там, где люди обычно не ходят. Вам будет так спокойнее, и другие не будут на вас глядючи лихачить.
Вот, нашел :
Экран в очках маленкий получается. ((
В последних, дорогущих очках от Толстой - тоже есть встроенная камера. Возможно, вам это бы подошло, чтобы лихорадочно не снимать одни и не надевать другие очки.
А про маленький экран, это да. Я когда надеваю очки после шлема, думаю, блин какой маленький "монитор"(зато какой чёткий!). Будь у шлема другая матрица (пожмотился, слишком большие пиксели), и будь другая компоновка (когда-нибудь дойдут руки до переделки шлема, хотя бы и с этой матрицей) - я летал бы в шлеме.
Пока что летаю преимущественно в очках из-за того что они меньше по весу (и картинка чётче), с ними проще "покинуть своё тело" - больше эффект погружения.
И самое главное - что бы не случилось в воздухе - СОХРАНЯТЬ СПОКОЙСТВИЕ! Случится может всякое - например кувырок коптера по непонятным причинам, потеря РУ, потеря видео, сильный ветер (летом могут и птички напасть). Много раз сталкивался с тем, что взлетая у поверхности ветра нет, после набора высоты коптер начинает сдувать со скоростью 60 и более км/час. И это несмотря на попытку лететь против ветра...
Скоро напишу статью про улет своего коптера и последующий поиск его (и главное, находку потеряшки). При поиске шагал по лесу и по бывшему болоту. Речь идет про километры удаления.
Кстати, Александр - у вас средства поиска на борту имеются?
Из этих полётов вывел сам для себя правило:
"Необходимо забыть, что ты находишься на земле и постараться убедить себя, что ты в самолёте".
Тяжело было помнить это правило, когда пролетал и видел себя. Начинал вспоминать как я стою относительно севера, как относительно меня расположен самолёт... По началу терялся (краши соответственно были), потом стало проще.
Сейчас летаю на квадрике с подвесом - нравиться больше =)
Я говорю за то, что без подвеса по курсовой камере летал - коленки тряслись (коптЁр колбасит в небе, в шлЁме вообще непонятно что); а сейчас видео беру со стабилизированной ГоПрошки. Спокойный как удав =)
Купил назу, раму заказал, моторки, даже модуль фрискаевский.
Но он пока кроме меня никого не знает.
Тоже по ФПВ летать хочет
У меня спокойствие заканчивается, когда я на на фантоме на пол кадра вижу винты.
А это значит, что квадрик имеет угол >30гр.
Если не принять мер - у назы крышу сносит.
<font class="">Несколько раз вдруг ни с того ни с сего начинал сходить с ума (в режиме удержания по ГПС), колбасит и закручивает. Перевожу в режим АТТИ, поддаю газку и вроде ровняется.
Файл сэф при этом включать не нужно. Я считаю, что лучше вывести в ручное управление, стабилизировать, потом плясать</font>
Олег, если нет желанья вписаться в Viber, скинь @mail. Думаю у 2-х начинающих коптеристов найдутся общие темы для обсуждения.