Идея не моя, но думаю имеет право на жизнь.

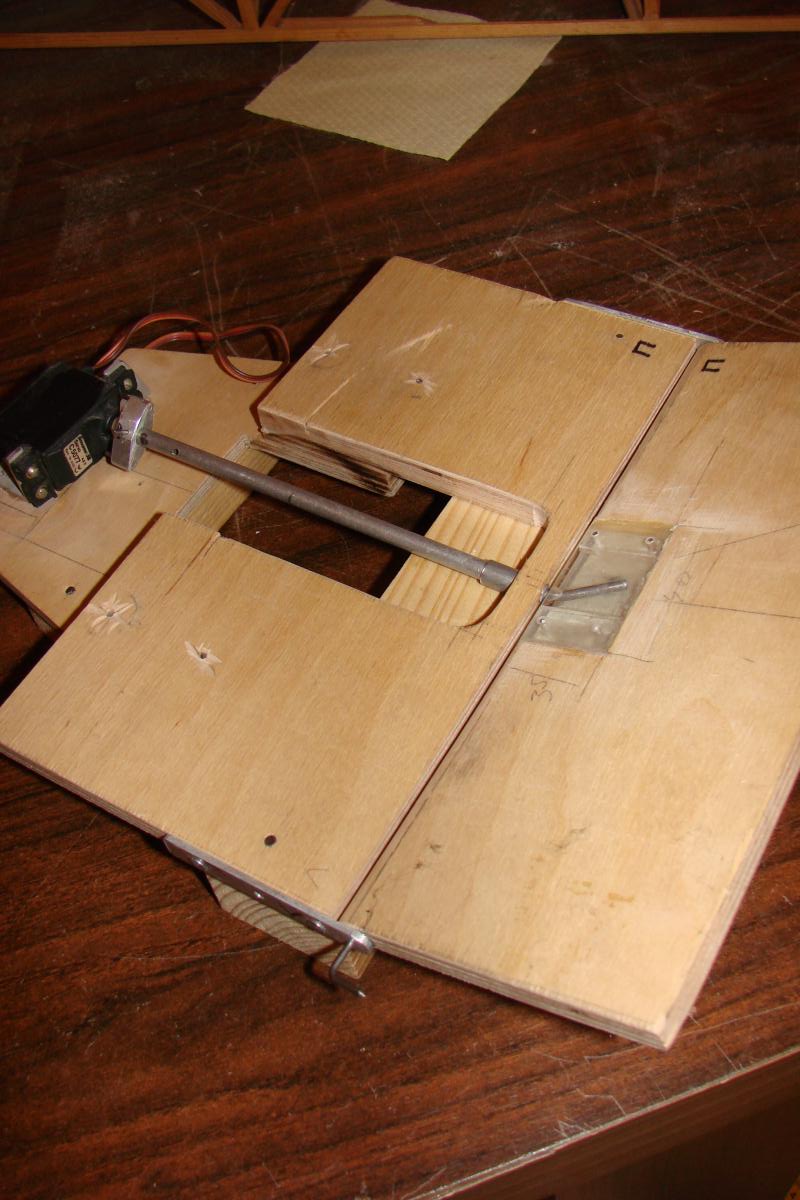
Из фото в принципе все ясно, устройство не для новичков конечно.
О достоинствах и недостатках можно спорить ...
(RDS_equation.pdf)
| Язык оригинала: | |
| Язык перевода: | |
| Вознаграждение: |
Чтобы общаться и совершать покупки необходимо зарегистрироваться.
Это просто и займёт всего одну минуту.
Спасибо за регистрацию!
| Удаленные товары | |||||||
| Очистить | |||||||













Решение хорошее и применяю его то же давно но ограничено.
Механизм хоршо работает если необходимы отклонения управляющих плоскостей на угол не более 25-30 градусов.
Связано это с кинематикой в повортном ползуне. Увы но поворот на большие углы не возможен при такой конфигурации. На точность отработки управляемых поверхностей сильно зависит величина зазор. Без люфта работать будет (теоритически) но напряжно, так как в основе ползунковый механизм. Если позволяет размер механизма можно улучшить его работу простым способом -на отогнутый конец привода надеть втулку (можно на всю длину но ступенчатую с маклимальным диаметром в конце или составную из двух различных по диаметру) , так что бы она легко врашалась на оси и разумеется не спадала с оси.
Таким образом, привод будет работать по направляющим поверхностям только в зоне соприкосновения втулки по максимальному диаметру с корманом ползункового механизма.
Втулка будет иметь возможность вращатся на оси привода.
В целом уменьшается нагрузка на конструкцию, а так же, меньше влияние неточности изготовления на работу привода в целом.
интересное решение и на поверхности ничего не торчит. технология хороша для действующих копийных моделей. у меня только пока возник один вопрос о нагрузке на серву.
+