Радиоуправляемые модели самолетов, вертолетов, автомобилей, катеров, яхт и танков.
Гарантируем ваше удовольствие либо возврат денег. На сайте огромное количество отзывов о нашей работе и товарах.
Автопилот HKPilot Mega V2.5 USB/GYRO/ACC/MAG/BARO
Мы сохраняем такие товары, чтобы дать возможность Вам получать информацию из накопленных комментариев и отзывов.
.jpg)



.jpg)



.jpg)
.gif)
.jpg)

-
HKPilot Mega 2.5 это современный универсальный автопилот, основанный на открытом проекте АрдуПилотМега 3D Robotic APM. Его универсальность заключается в том, что он позволяет использовать его для управления разнообразными моделями самолетов, классических вертолетов, мультироторных систем, а также автомобилей! Плата стабилизации и управления HKPilot Mega 2.5 оснащена самыми лучшими на сегодняшний день датчиками. В отличии от простых устройств стабилизации, этот автопилот поддерживает запрограммированные Вами миссии автономного полета аппарата по заданным точкам в системе GPS, а также обеспечивает самостоятельный взлет и посадку . Это позволяет эффективно использовать его не только в развлекательных целях, но и для выполнения миссий в профессиональных проектах!
Особенности:
• Arduino совместимый
• Полностью собранный и проверенный
• 3 осевой гироскоп, акселерометр, магнитометр и высокоэффективный барометр
• Бортовой 16 Mbit Dataflash чип для автоматической регистрации полетных данных
• Цифровой компас HMC5883L
• 6 осевой Акселерометр/гироскоп MPU-6000
• Датчик атмосферного давления MS5611-01BA03.
• Два микроконтроллера ATMEGA2560 и ATMEGA32U-2 (обработка и функция USB).
• Связь с компьютером через разъем микро USB
Спецификация:
Размеры: 67x40x10mm
Вес: 17g
Комплектация:1. Плата HKPilot Мега 2.5 – 1шт.
2. Соединительный шнур 3pin 2.54mm – 5 шт.
*Примечания:
Поставляется без модуля GPS. Продается отдельно.
Этот продукт основан на проекте http://3drobotics.com/apm/ от 3D Robotics
PRODUCT ID: 9387000016
-
The HKPilot Mega 2.5 is a complete open source autopilot system featuring the best selling technology. This version is ready to use, with no assembly required. It allows the user to turn any fixed wing, rotary wing or multi-rotor vehicle (even boats and car) into a fully autonomous vehicle capable of performing programmed GPS missions with waypoints (GPS module required - sold separately).
Features:
• Arduino Compatible
• pre-soldered and tested
• 3-axis gyro, accelerometer, magnetometer and high-performance barometer
• Built in 4 MP Dataflash chip for automatic data logging
• Honeywell HMC5883L-TR Digital compass
• Invensense's 6 DoF Accelerometer/Gyro MPU-6000
• Measurement Specialties MS5611-01BA03 Barometric pressure sensor.
• Atmel ATMEGA2560 and ATMEGA32U-2 (processing and USB function).
• Micro-USB
*Note: GPS module is not included. Sold separately.
Specs:
Dimensions: 67x40x10mm
Weight: 17g
Includes:
HKPilot Mega 2.5
3pin 2.54mm pitch connection leads x 5This product is based on the APM Project from 3D Robotics.
*Note: This is not an original Arduino brand product.
-
ArduPilot Mega 2.5 это открытый проект автопилота, наиболее продаваемый в мире, он победил на престижных соревнованиях Outback Challenge UAV в 2012 году. Он полностью готов к работе, не требует пайки. Он позволяет пользователю превращать любой самолет, вертолет или мультикоптер (и даже автомобили и лодки) в полностью автономное транспортное средство, способное к движению по заданным точкам по GPS.
• 4 чипа для записи параметров полета
Особенности:
• Ардуино совместимый
• Не надо паять, уже протестирован
• Присутствует 3-х осевой гироскоп, акселерометр и магнитометр, высокоточный барометр(высотомер)• Цифровой компас HMC5883L-TR
• Первый открытый проект автопилота использующий 6 акселерометров/гироскопов MPU-6000
• Барометр на сенсоре MS5611-01BA03
• Микропроцессоры ATMEGA2560 и ATMEGA32U-2 для обработки данных и работы USB .
• Оригинальный Molex Micro-USB
Характеристики:
Размеры: 67x40x10мм
Вес: 17гр
Комплектация:
ArduPilot Mega 2.5
5 коннекторов 3pin 2.54мм
-
The ArduPilot Mega 2.5 is a complete open source autopilot system featuring the best selling technology that won the prestigious 2012 Outback Challenge UAV competition. This version is ready to use, with no assembly required. It allows the user to turn any fixed wing, rotary wing or multi-rotor vehicle (even cars and boats) into a fully autonomous vehicle capable of performing programmed GPS missions with waypoints.
Features:
• Arduino Compatible
• Comes pre-soldered (with straight pins) and tested
• Includes 3-axis gyro, accelerometer and magnetometer, along with a high-performance barometer
• Onboard 4 MP Dataflash chip for automatic data logging
• Digital compass powered by Honeywell's HMC5883L-TR chip, now included on the main board
• One of the first open source autopilot systems to use Invensense's 6 DoF Accelerometer/Gyro MPU-6000
• Barometric pressure sensor upgraded to MS5611-01BA03, from Measurement Specialties.
• Atmel's ATMEGA2560 and ATMEGA32U-2 chips for processing and USB functions respectively.
• On board enhancing genuine Molex Micro-USB
Specs:
Dimensions: 67x40x10mm
Weight: 17g
Includes:
ArduPilot Mega 2.5
3pin 2.54mm pitch connection leads x 5
PRODUCT ID: 9387000016
Упоминается в статьях и вопросах
 Самолет из линеек91
Самолет из линеек914 августа 2013 года в 02:00 | Дмитрий Захаров Иваново
 Статья http://www.parkflyer.ru/blogs/view_entry/1999/
Статья http://www.parkflyer.ru/blogs/view_entry/1999/  Полеты "майского жука" - Tarot FY68082
Полеты "майского жука" - Tarot FY6808216 мая 2014 года в 15:08 | Александр Н Санкт-Петербург
Статья http://www.parkflyer.ru/blogs/view_entry/8170/  На пути к совершенству. HKPilot Mega V2.5281
На пути к совершенству. HKPilot Mega V2.528110 апреля 2014 года в 18:01 | Юрий Комаров Винсады, Предгорный район
Статья http://www.parkflyer.ru/blogs/view_entry/7656/ Самолет из линеек914 августа 2013 года в 02:00 | Дмитрий Захаров Иваново
Статья http://www.parkflyer.ru/blogs/view_entry/1999/ Полеты "майского жука" - Tarot FY6808216 мая 2014 года в 15:08 | Александр Н Санкт-Петербург
Статья http://www.parkflyer.ru/blogs/view_entry/8170/ На пути к совершенству. HKPilot Mega V2.528110 апреля 2014 года в 18:01 | Юрий Комаров Винсады, Предгорный район
Статья http://www.parkflyer.ru/blogs/view_entry/7656/  Как собрать квадролёт очень доступно для чайников63
Как собрать квадролёт очень доступно для чайников6310 ноября 2013 года в 19:28 | Юрий К Екатеринбург
Статья http://www.parkflyer.ru/blogs/view_entry/2872/  Крайний и пока самый долго да и пожалуй дорого развивающийся проект63
Крайний и пока самый долго да и пожалуй дорого развивающийся проект6316 августа 2013 года в 21:01 | Юрий К Екатеринбург
Статья http://www.parkflyer.ru/blogs/view_entry/2094/ 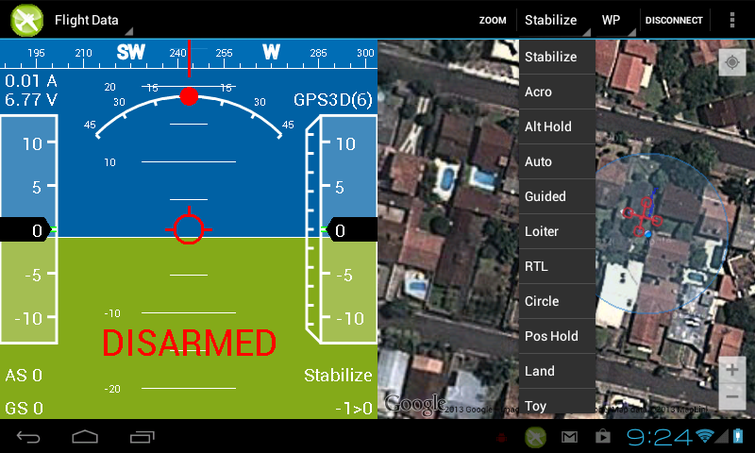 3DR Radio + Android = дружба навек!52
3DR Radio + Android = дружба навек!5221 ноября 2013 года в 18:02 | Никола Питерский Сочи
Статья http://www.parkflyer.ru/blogs/view_entry/3043/  Комплектация мультироторов или очередная попытка систематизировать всю информацию по теме42
Комплектация мультироторов или очередная попытка систематизировать всю информацию по теме4215 октября 2013 года в 23:17 | Павел Петунин Томск
Статья http://www.parkflyer.ru/blogs/view_entry/2617/ Первая съемка с квадрокоптера!4127 июля 2014 года в 13:24 | Сергей Лобойко Усть-Лабинск
Статья http://www.parkflyer.ru/blogs/view_entry/8932/  Гекса Tarot IronMan FY680 - Мой "Build Log".32
Гекса Tarot IronMan FY680 - Мой "Build Log".326 ноября 2013 года в 11:05 | Александр Н Санкт-Петербург
Статья http://www.parkflyer.ru/blogs/view_entry/2825/  Экранирование HKpilot 2.51
Экранирование HKpilot 2.5115 октября 2014 года в 09:31 | Алексей Муратов Электросталь
Вопрос http://www.parkflyer.ru/blogs/view_entry/9685/ 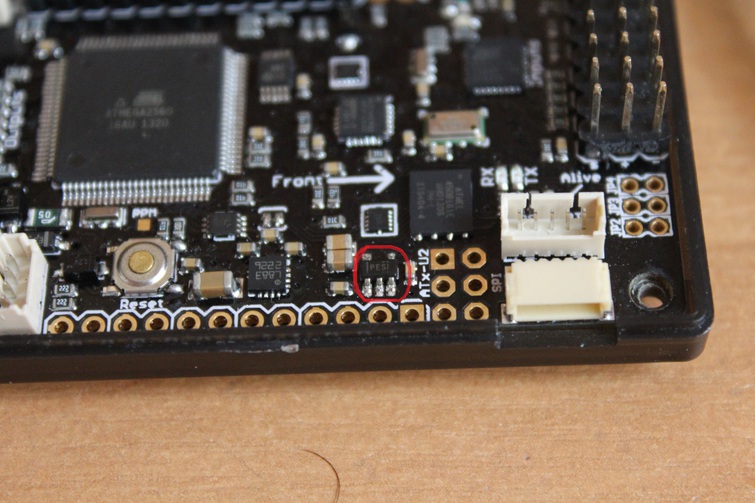 APM 2.50
APM 2.5020 июня 2014 года в 02:34 | Дмитрий Соловьев Липецк
Вопрос http://www.parkflyer.ru/blogs/view_entry/8570/ Вопрос по подключению 1 GPS модуля к 2 системам02 августа 2014 года в 13:41 | Дмитрий Соловьев Липецк
Вопрос http://www.parkflyer.ru/blogs/view_entry/8991/ 













- Аккумуляторы и зарядники
- Сборка
- Самолёты
- Все самолеты
- Durafly Aircraft
- Avios RC Aircraft
- Kingcraft RC Aircraft
- H-King RC Aircraft
- Ready-To-Fly (RTF)
- Plug-N-Fly (PNF)
- Almost Ready To Fly (ARF)
- Запчасти для ремонта
- Системы стабилизации полета
- Для новичков
- Склей и лети
- Парковые модели
- Летающее крыло/треугольное крыло
- Самолеты 3D
- Масштабные копии
- Спортивные и пилотажные модели
- FPV модели
- Военные самолеты
- Самолеты с импеллером
- Планеры
- ДВС самолеты
- Метательные планеры
- Огромные самолеты
- Планера для горных склонов
- Бипланы и трипланы
- Комнатные самолеты
- Самолеты из бальзы
- Гидросамолеты
- Модели для ночных полетов
- Композитные модели
- Вырезанные лазером наборы
- Декоративно-тренировочные модели
- Кордовые модели
- Diecast Planes
- Дроны
- Полёты по камере
- Автомодели и мотоциклы
- Камеры
- Серво и радиоуправление
- Системы питания
- 3D печать, роботы
- Судомодели
- Вертолеты
- Модели поездов
- Lifestyle
- Спецпредложения
- Bargain Bin
Чтобы общаться и совершать покупки необходимо зарегистрироваться.
Это просто и займёт всего одну минуту.
Спасибо за регистрацию!
Для подробностей, наведите курсор на одну из картинок.
| Удаленные товары | |||||||
| Очистить | |||||||
В общем, бережем контроллер - по максимуму запитываемся "снаружи" контроллера.
И уж точно никакие сервы не питаем с контроллера...
В итоге искал не там, где в итоге он оказался. Контактный телефон на борту был?
ни как не получается откалибровать компас
При калибровке выходит ошибка “Log does contain enough data”
В главном окошке также выдаёт Bad Compass Health
Что при этом нужно делать ?
За ранее спасибо
enabled
Mag Dec: 0.0000
Mag off: 0.0000, 0.0000, 0.0000
Motor Comp: off
Может его как то нужно активировать ?
Вот здесь описывается подобная проблема http://www.rcgroups.com/forums/showthread.php?t=1820773&page=707
Но на вражеском языке не все аспекты понятны
Как убедиться в исправности магнитометра?
было тоже самое, как тока не пытался победить и победил, там на плате контролера есть перемычка она запаяна если компас на борту и ее разрезают если компас делают выносной, вобщем запаяйте ее и все будет тип топ
2. Если такая микросхема установлена, проверь запаяна ли перемычка.
3. Если первые два пункта присутствуют, то термофен (для пайки смд компонентов) в руки и вперед и с песней пропаивать контроллер.
P.S. мне помог пункт три.