Всем привет. Мой материал будет полезен новичкам - тем, кто только собирается собрать свой первый коптер, и в голове творится настоящий хаос. Я подбил итоговую таблицу всех деталей с ценами и ссылками, которые использовал. Таким образом, купив всё, что указанно в таблице, и собрав, вы получите готовый летательный аппарат. Также опишу базовую настройку. Свой коптер я буду использовать для FPV и видеосъёмок.


Вот, что было купленно:
Суммарно на доставку было потрачено $124,98. Т.е. 372,99+124,98. Если заказать всё одной посылкой, то будет в районе ~$50.
Процесс сборки рамы не вызывает затруднений. Единственное, пришлось поработать напильником, т.к. крепёжные отверсия не соответствовали друг другу.
Перед тем, как размещать узлы на раме, нужно откалибровать каждый регулятор со своим мотором:
(видео калибровки предоставленны моим товарищем по хобби - Владимиром)
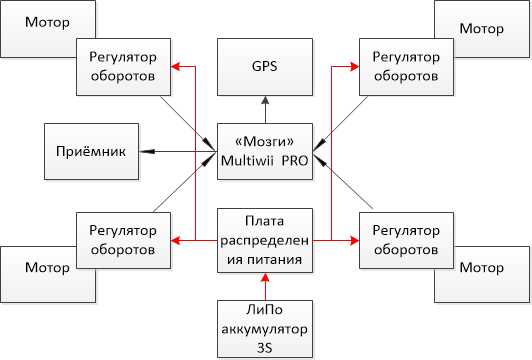
Ниже схема, описывающая что нужно с чем соединить на раме:
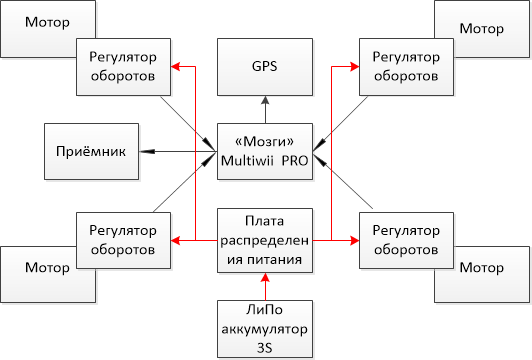
Плата подключается так (питание идёт от регуляторов оборотов):
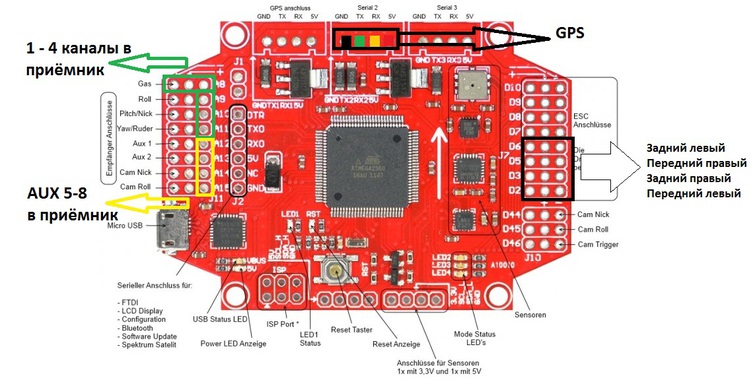 Подключение платы к приёмнику:
Подключение платы к приёмнику:
A8 - thr 2 канал
A9 - roll 1 канал
A10 - pitch 3 канал
A11 - yaw 4 канал
A12 - AUX1
A13 - AUX2
A14 - AUX3
A15 - AUX4
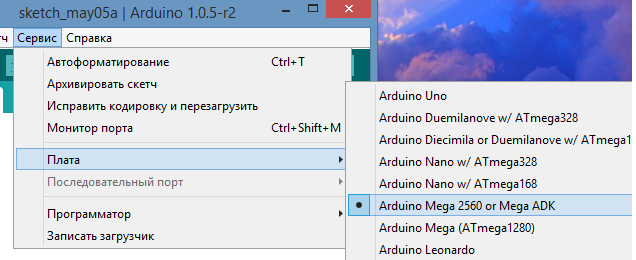
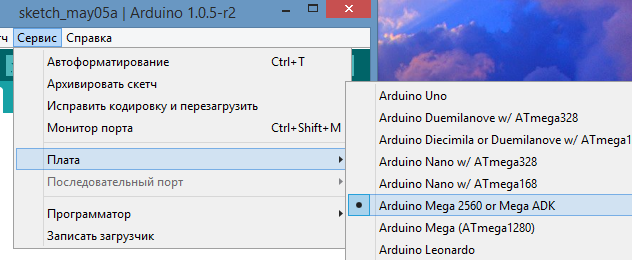
После сборки нужно установить на компьютер драйвер usb и скачать прошивку. Я начал со стоковой прошивки версии 2.3, но в итоге купил прошивку от Маховика. Его прошивка - это переработанная официальная прошивка для платы Multiwii PRO (и не только, в списке поддерживаемых прошивкой плат - 61 шт.). Для редактирования и закачки прошивки нужно использовать программу Arduino. Подключаем по USB коптер, запускаем Arduino и указываем в ней последовательный порт (у меня это com4) и тип платы:
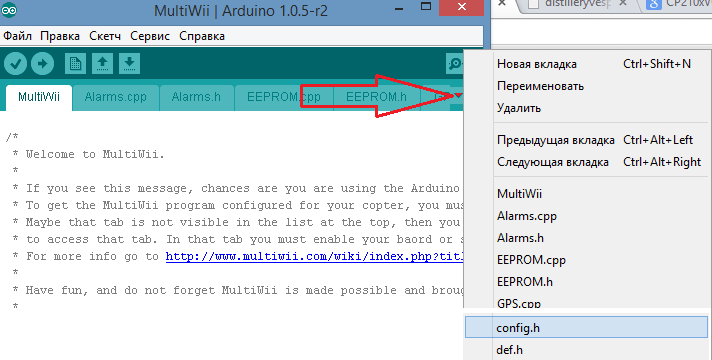
После чего нужно внесте 2-3 поправки в код прошивки, которую вы скачали. Для этого в Arduino нажимаем Файл-открыть-MultiWii.ino, далее вот так открываем для редактирования конфигурационный файл config.h:
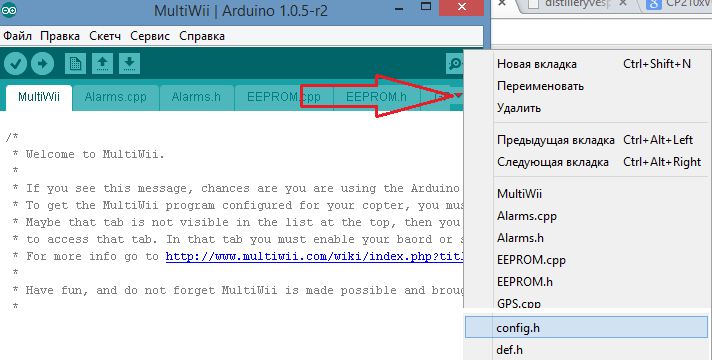 Тут нужно раскомментировать строку #define QUADX, если у Вас 4 мотора как у меня.
Тут нужно раскомментировать строку #define QUADX, если у Вас 4 мотора как у меня.
//#define QUADP
#define QUADX
//#define Y4
И активировать GPS. Для этого раскомментировать строку #define GPS_SERIAL 2.
Также следует убедиться, что выбрана именно ваша плата. У меня это: #define FFIMUv2.
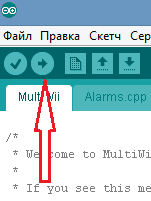
Теперь можно компилировать и загружать код в плату. Для этого нажимаем в стрелочку:
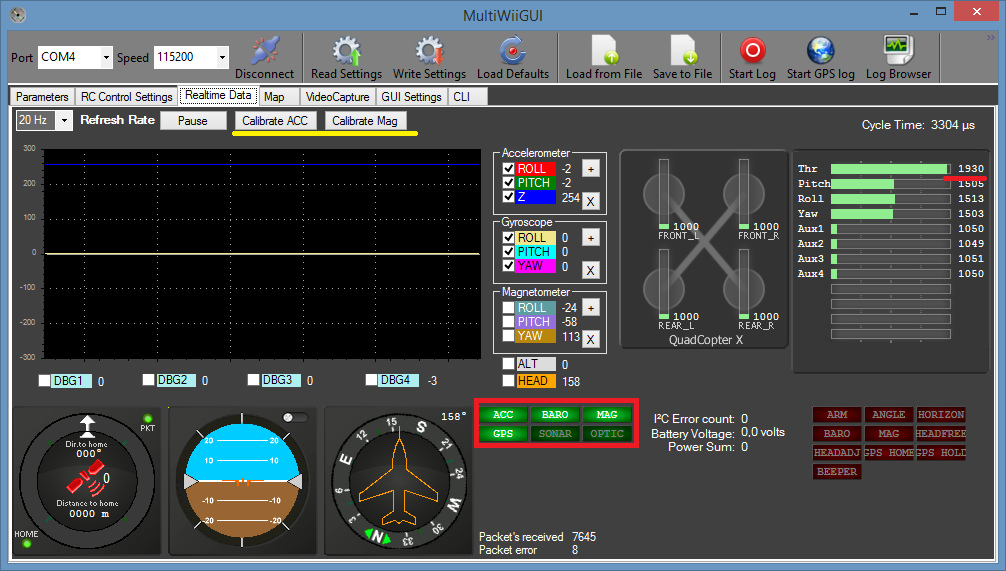
После этого скачиваем софт для настройки коптера. Запускаем программу и в левом верхнем углу нажимаем connect (должен быть указан com порт и скорость 115200). Калибруем компас (нужно покрутить вокруг всех 3-х осей) и акселерометр (просто чтобы постоял на горизонтальной поверхности). После этого оживут приборы на виртуальной панеле:
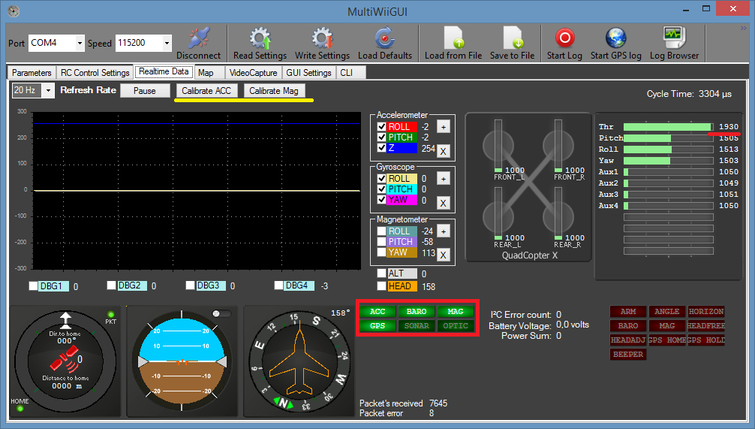
В красной рамочке отображаются статусы подключённых датчиков. (*У вас интерфейс будет выглядеть иначе, т.к. у меня WinGUI 2.2.). Красной линией я подчеркнул максимальный лимит по газу.
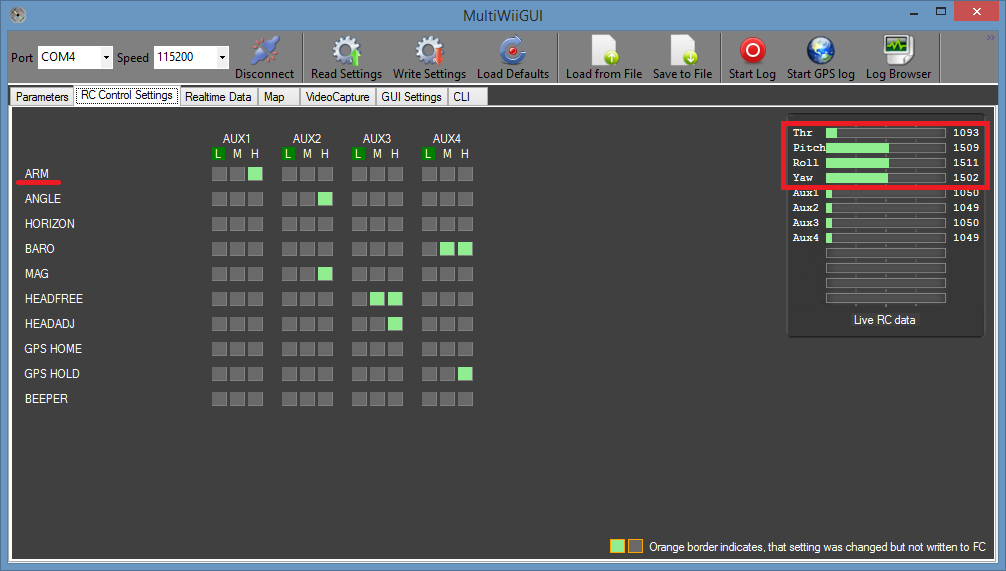
Очень важно выставить корректные лимиты на аппе Tyrnigy, чтобы значения в WinGui были в диапазоне 1080-1950 (на картинке справа в красном квадрате) иначе не получится запустить моторы. Я свою аппу перепрошил на кастомную прошивку er9x, поэтому не смогу показать как выставить на стоковой прошивке эти лимиты, но в этом нет ничего сложного, поковыряйтесь в меню аппы;):
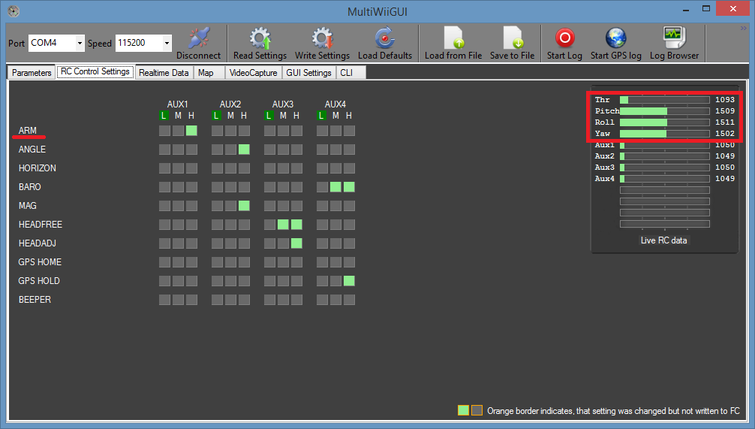
Теперь можно подключить аккумулятор (надеюсь винты вы не прикручивали к моторам;)) и попробовать запустить движки (заармить, ARM). Для этого есть два способа. Первый: стик газа опустить в минимум и сдвинуть вправо, так удерживать 3 секунды; или второй способ: установить на любой из 4-х каналов функцию ARM, как сделано у меня - на AUX1. И в настройках аппы назначить любой доступный переключатель для AUX1 (у меня канал 5). Если не накосячили с лимитами и откалибровали аксель и компас, то движки стартуют (ох, какой это приятный момент, всё ради него)).
Для понимания картины: 4 канал - yaw (Рысканье. Левый стик, движение по горизонтали), 2 канал - Thr (Газ. Левый стик по вертикали), 3 канал - pitch (Тангаж. Правый стик по вертикали), 1 канал - roll (Крен. Правый стик по горизонтали). Если стики на аппе перепутаны и не соответствуют вышенаписанному, то движки не стартуют.
Первая попытка оторвать квадрик от пола без настроек:
Испытания в поле со стоковой прошивкой:
Сегодня сильный ветер, и нет возможности записать видео, как сейчас летает мой коптер на альтернативной прошивке. Позже выложу в комментариях.
Спасибо за ваше внимание!
З.Ы. Про подвес Tarot t-2d+minimOSD+GoPro3 напишу в следующей статье (http://www.parkflyer.ru/87886/blogs/view_entry/8904/).
З.Ы.2 Удивительно, но сабака меня ревнует к коптеру! С кем-нибудь случалось подобное?)

Суммарно на доставку было потрачено $124,98. Т.е. 372,99+124,98. Если заказать всё одной посылкой, то будет в районе ~$50.
Процесс сборки рамы не вызывает затруднений. Единственное, пришлось поработать напильником, т.к. крепёжные отверсия не соответствовали друг другу.
Перед тем, как размещать узлы на раме, нужно откалибровать каждый регулятор со своим мотором:
(видео калибровки предоставленны моим товарищем по хобби - Владимиром)
Ниже схема, описывающая что нужно с чем соединить на раме:
Плата подключается так (питание идёт от регуляторов оборотов):
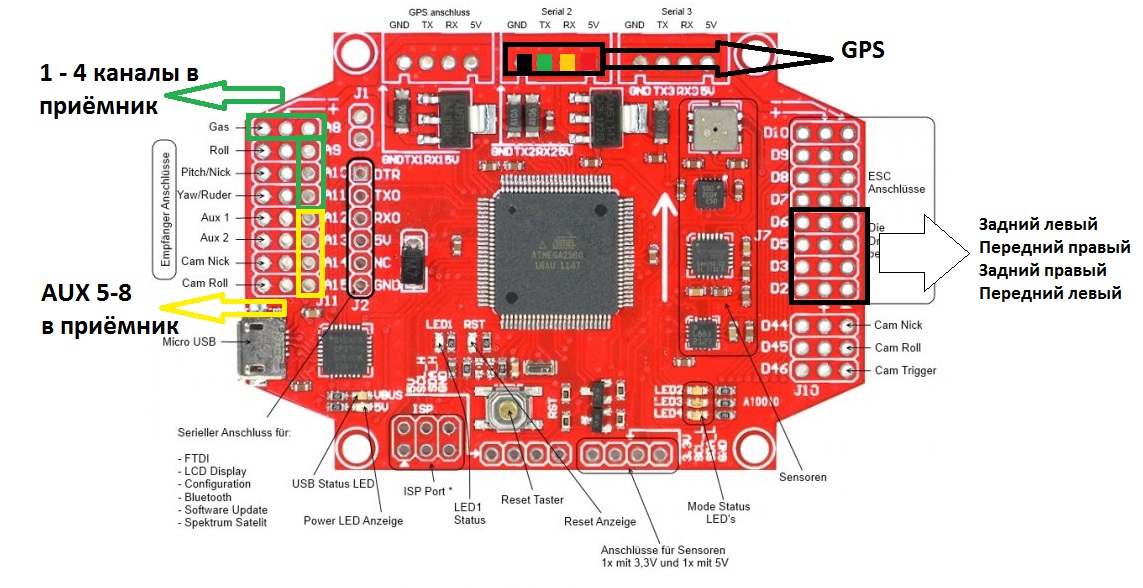 Подключение платы к приёмнику:
Подключение платы к приёмнику:A8 - thr 2 канал
A9 - roll 1 канал
A10 - pitch 3 канал
A11 - yaw 4 канал
A12 - AUX1
A13 - AUX2
A14 - AUX3
A15 - AUX4
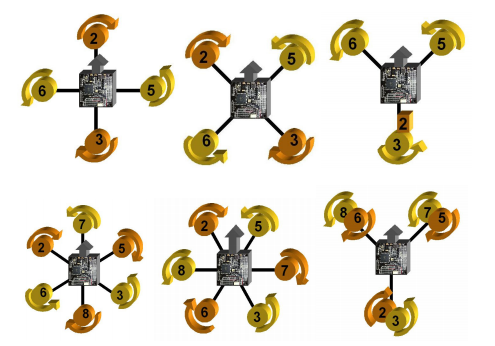
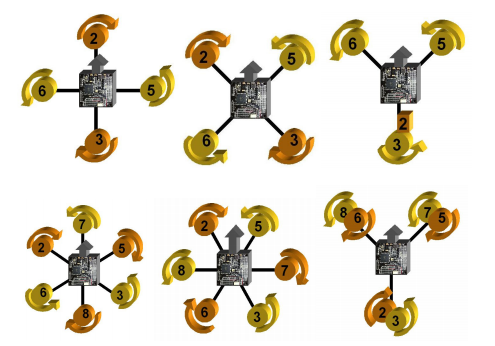
Моторы подключаются согласно схеме:
После сборки нужно установить на компьютер драйвер usb и скачать прошивку. Я начал со стоковой прошивки версии 2.3, но в итоге купил прошивку от Маховика. Его прошивка - это переработанная официальная прошивка для платы Multiwii PRO (и не только, в списке поддерживаемых прошивкой плат - 61 шт.). Для редактирования и закачки прошивки нужно использовать программу Arduino. Подключаем по USB коптер, запускаем Arduino и указываем в ней последовательный порт (у меня это com4) и тип платы:
После чего нужно внесте 2-3 поправки в код прошивки, которую вы скачали. Для этого в Arduino нажимаем Файл-открыть-MultiWii.ino, далее вот так открываем для редактирования конфигурационный файл config.h:
 Тут нужно раскомментировать строку #define QUADX, если у Вас 4 мотора как у меня.
Тут нужно раскомментировать строку #define QUADX, если у Вас 4 мотора как у меня.//#define QUADP
#define QUADX
//#define Y4
И активировать GPS. Для этого раскомментировать строку #define GPS_SERIAL 2.
Также следует убедиться, что выбрана именно ваша плата. У меня это: #define FFIMUv2.
Теперь можно компилировать и загружать код в плату. Для этого нажимаем в стрелочку:

После этого скачиваем софт для настройки коптера. Запускаем программу и в левом верхнем углу нажимаем connect (должен быть указан com порт и скорость 115200). Калибруем компас (нужно покрутить вокруг всех 3-х осей) и акселерометр (просто чтобы постоял на горизонтальной поверхности). После этого оживут приборы на виртуальной панеле:
В красной рамочке отображаются статусы подключённых датчиков. (*У вас интерфейс будет выглядеть иначе, т.к. у меня WinGUI 2.2.). Красной линией я подчеркнул максимальный лимит по газу.
Очень важно выставить корректные лимиты на аппе Tyrnigy, чтобы значения в WinGui были в диапазоне 1080-1950 (на картинке справа в красном квадрате) иначе не получится запустить моторы. Я свою аппу перепрошил на кастомную прошивку er9x, поэтому не смогу показать как выставить на стоковой прошивке эти лимиты, но в этом нет ничего сложного, поковыряйтесь в меню аппы;):
Теперь можно подключить аккумулятор (надеюсь винты вы не прикручивали к моторам;)) и попробовать запустить движки (заармить, ARM). Для этого есть два способа. Первый: стик газа опустить в минимум и сдвинуть вправо, так удерживать 3 секунды; или второй способ: установить на любой из 4-х каналов функцию ARM, как сделано у меня - на AUX1. И в настройках аппы назначить любой доступный переключатель для AUX1 (у меня канал 5). Если не накосячили с лимитами и откалибровали аксель и компас, то движки стартуют (ох, какой это приятный момент, всё ради него)).
Для понимания картины: 4 канал - yaw (Рысканье. Левый стик, движение по горизонтали), 2 канал - Thr (Газ. Левый стик по вертикали), 3 канал - pitch (Тангаж. Правый стик по вертикали), 1 канал - roll (Крен. Правый стик по горизонтали). Если стики на аппе перепутаны и не соответствуют вышенаписанному, то движки не стартуют.
Первая попытка оторвать квадрик от пола без настроек:
Испытания в поле со стоковой прошивкой:
Сегодня сильный ветер, и нет возможности записать видео, как сейчас летает мой коптер на альтернативной прошивке. Позже выложу в комментариях.
Спасибо за ваше внимание!
З.Ы. Про подвес Tarot t-2d+minimOSD+GoPro3 напишу в следующей статье (http://www.parkflyer.ru/87886/blogs/view_entry/8904/).
З.Ы.2 Удивительно, но сабака меня ревнует к коптеру! С кем-нибудь случалось подобное?)














На mahowii всё ок работает.
7,0-дюймовый TFT ЖК-монитор для FPV 800x480 со встроенным приёмником SkyZone 5.8GHz и разнесёнными антеннами.
SkyZone TS353 5.8ГГц 400мВт FPV-передатчик
Tarot T-2D V2 бесколлекторный подвес для GoPRO 3 с контроллером ZYX22
Универсальная рамка под FPV Монитор
Minim OSD v1.1
Если Когда приедет, выложу материал как всё это собралось и заработало.
Деревянную раму я бы, наверное, в первый же день в шепки разбил...лучи то аллюминивые гнутся.
Какой взлетный вес модели? Зачем такие мощные движки и регуляторы (или как говорится запас карман не тянет) и такой слабеньктй АКБ?
Мой коптер работает на 10 амперных регуляторах и движках на 9 А питаясь с 3баночного 5000мА полета хватает на 15 минут. На борту стоит видеосистема, телеметрия, АКБ для питания FPV. При этом рама полностью самодельная из дерева.
АКБ два 3S по 2200 в параллель, в смете этого провода нет, он ещё на почте.
Планирую подвес и камеру на него. Какие у Вас винты и взлётный вес?
Таких видео полно, но для меня оно первное и потому самое ценное...прям на слезу пробивает :))
Я позавчера чуть с хищником в небе не столкнулся (я не разбираюсь в птицах - беркут что ли). Пока от нее отлетаешь (типа убегаешь) - тобой интересуются. Идешь в атаку - хлыздят. )))
Да ещё в лойтере - у меня этот режим редко когда работает адекватно. Только стаб.