Всем привет! Это моя первая статья, так что не судите строго если что не так.
Мой первый коптер был сделан не продуманно и на скорую руку. Вот и решил всё сделать с нуля.
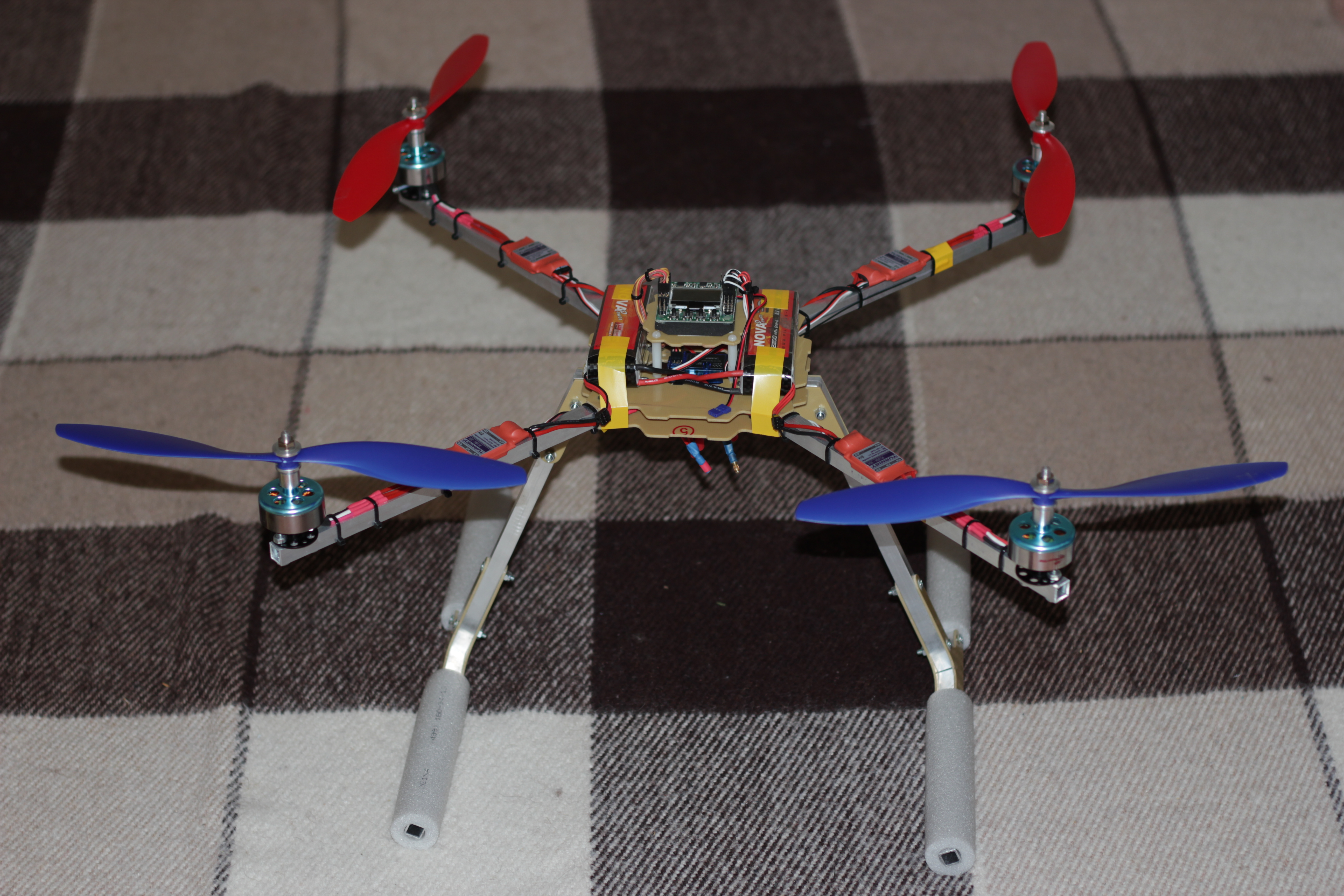
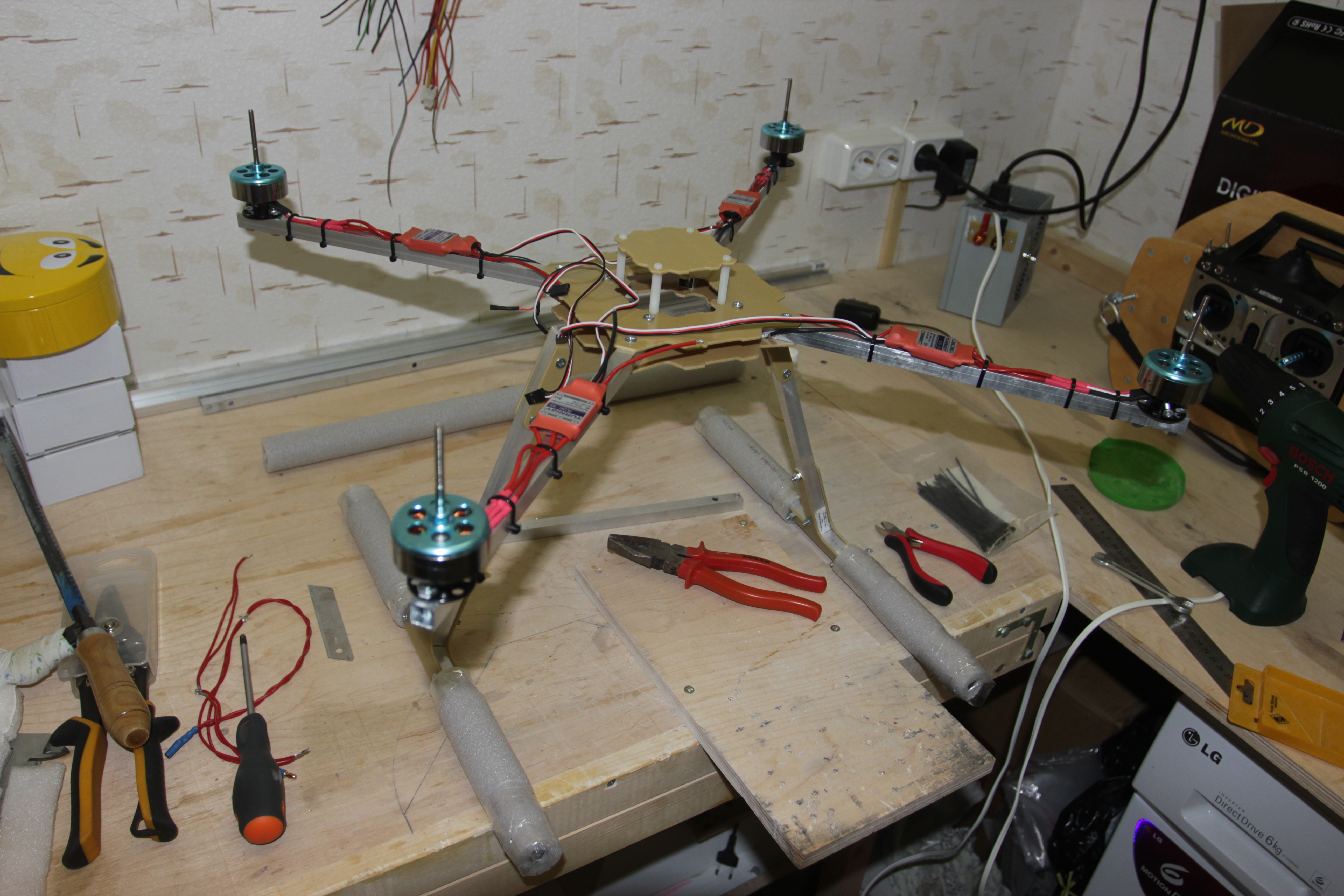
Аппарат получился 1950 грамм. От оси до оси мотора через центр 650 мм.
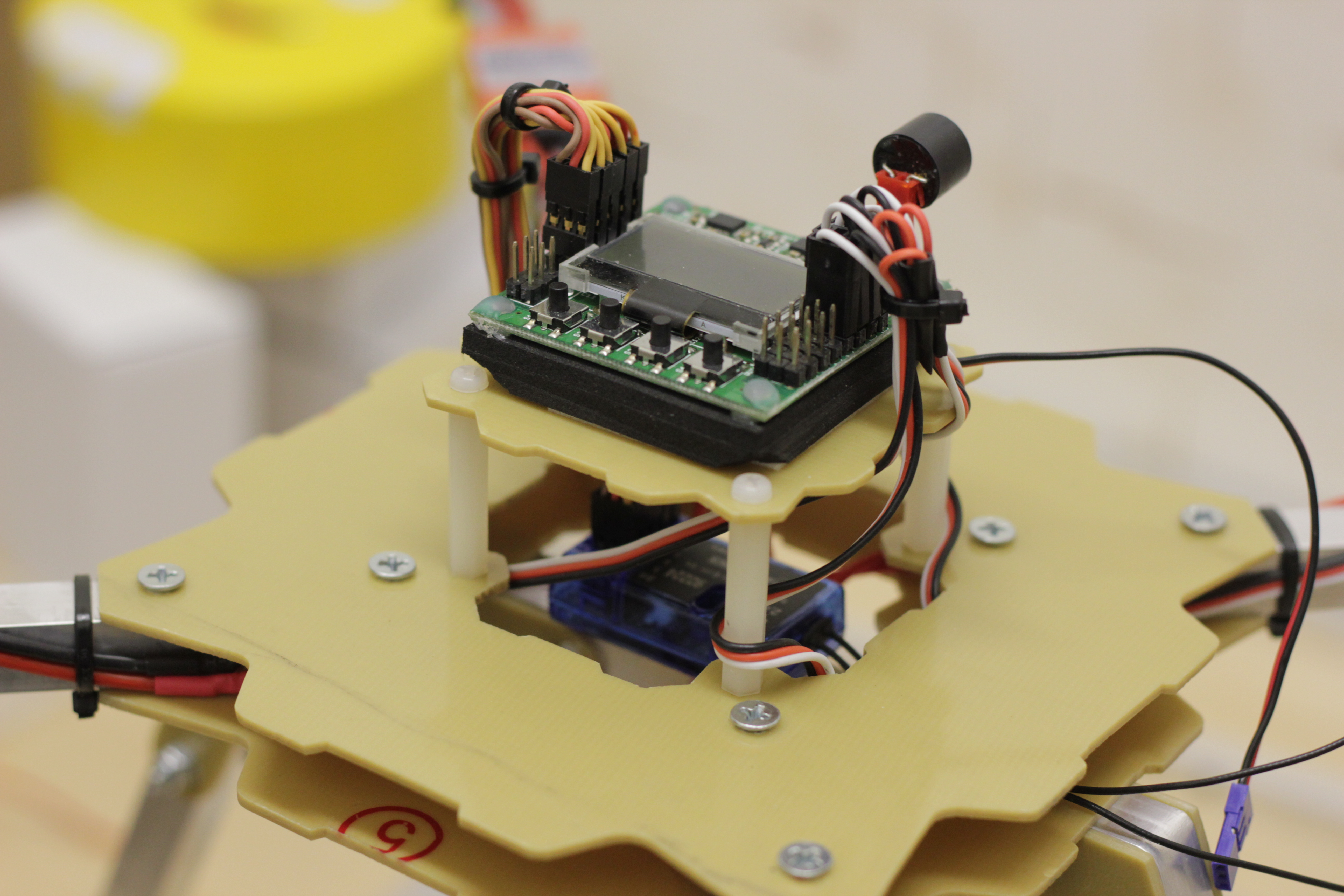
Контроллер взял KK2.0. прошивка 1.5.
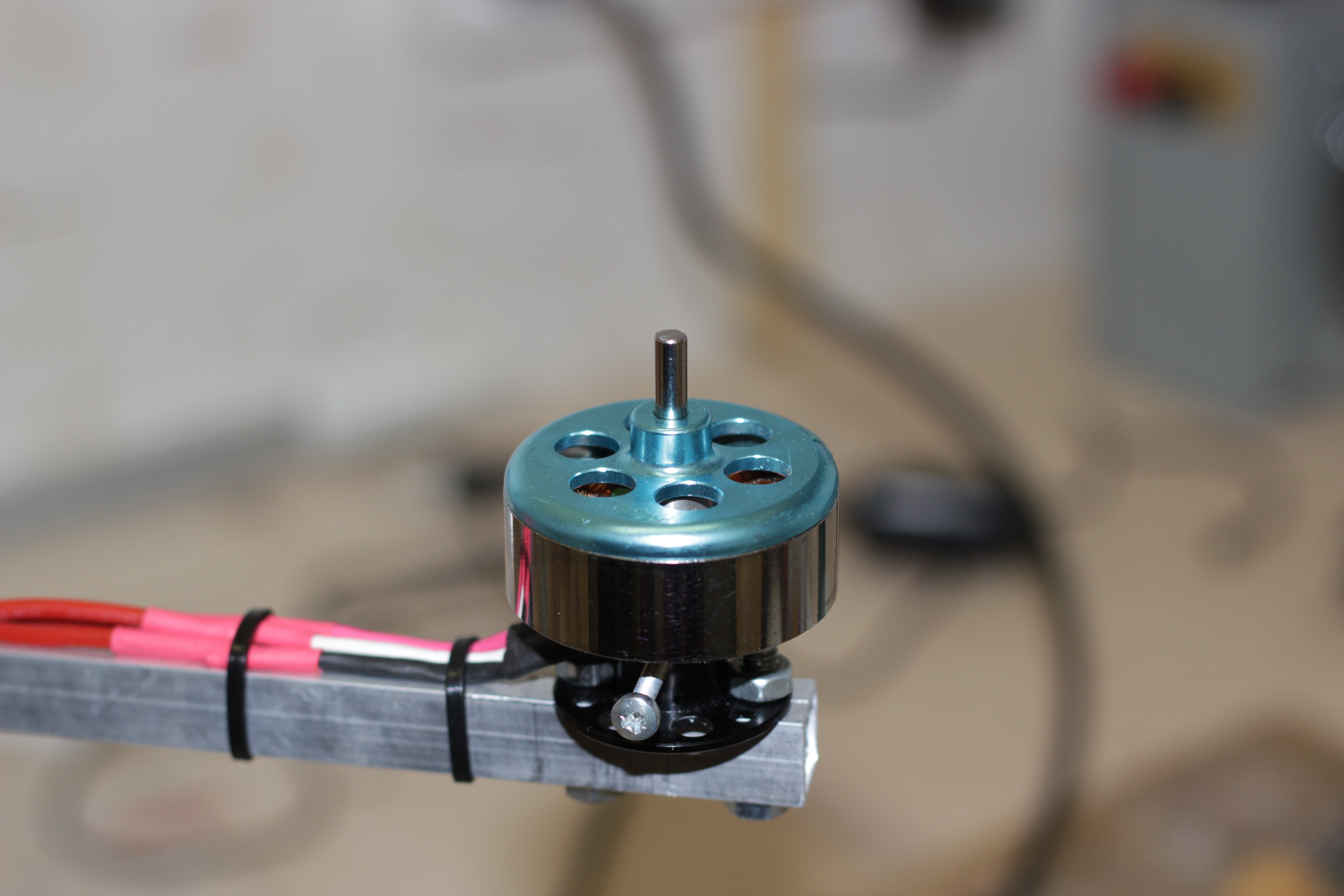
Моторчики D4023-850 Out Runner Motor
Адаптеры Цанговый адаптер для крепления пропеллера на вал 4,0мм
Регуляторы Регулятор скорости TURNIGY Plush 30А
Пропеллеры Пропеллеры 12x4,5 SF (цвет синий) 2шт. стандартного вращения / 2шт. RH вращения.
Пропеллеры 12x4,5 SF (цвет красный) 2шт. стандартного вращения / 2шт. RH вращения
Два аккумулятора 3-х баночный 2200 mAh 30C
Нейлоновый стойки Нейлоновые резьбовые стойки 5.6мм x 30мм M3.
Винтики Nylon Screw Phillips Head M3x8mm (10pcs)
Нашел в интернете склад который продаёт стеклотекстолит, оргстекло и прочие материалы. Обрезки не продавали, пришлось купоть целый лист ст.текстолита 1500х1000х2мм. обошелся он в 800 рублей. По пути домой заскочил на рынок и затарился пилками для лобзика и аллюминиевыми профилями 12.5х12.5х1000мм.
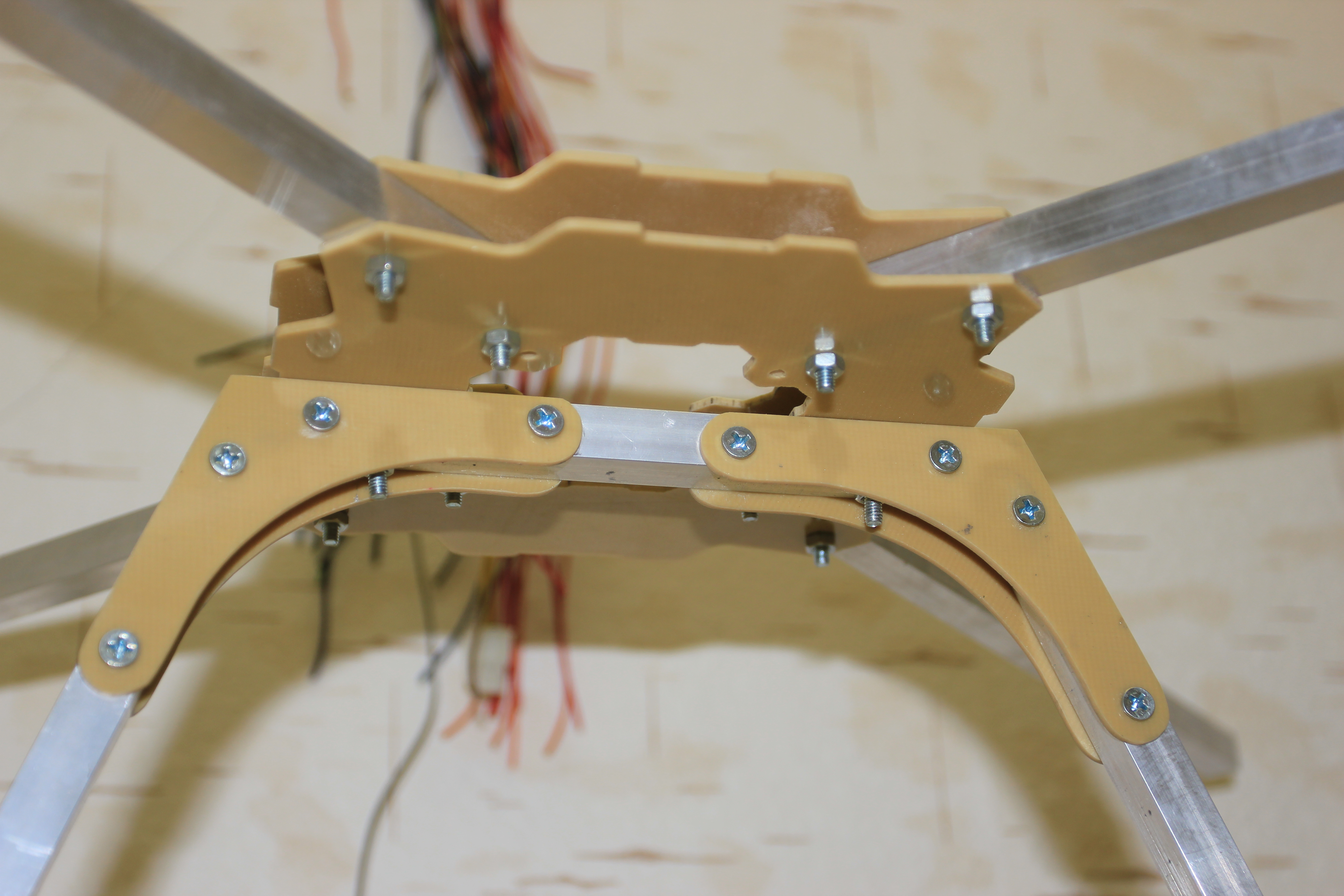
На форумах посмотрел, кто какие рамы делает. понравилась вот такая ценая часть, но пришлось немного подрисовать. Нарисовал, распечатар, приклеил к листу, намотал тряпку на лобзик и начал пилилть.

С лучами было по-проще.
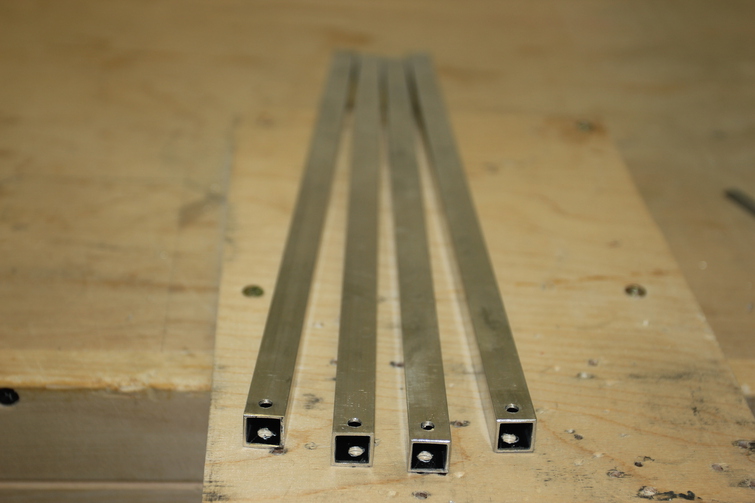
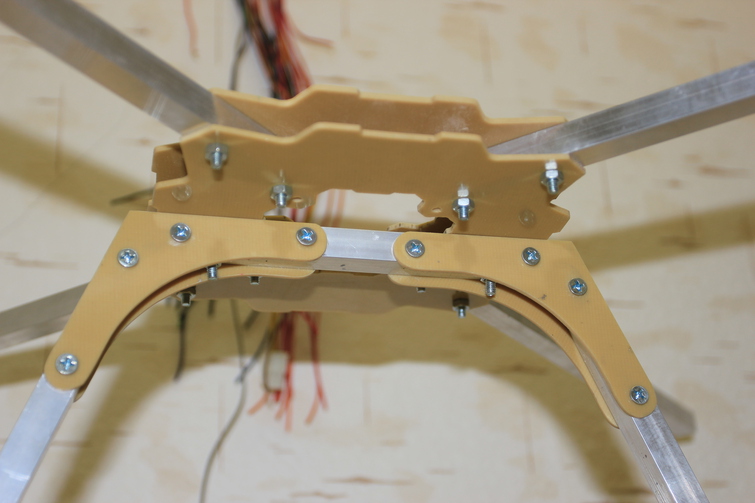
Сперва просверлил отверстия ближе к центру, прикрутил к пластинам и с помощью линейки и уголка выровнил лучи.
Вот что получилось.

Стойку собрал немного криво, глазомер подвел. Но с помощью натфиля все встало на своё место.
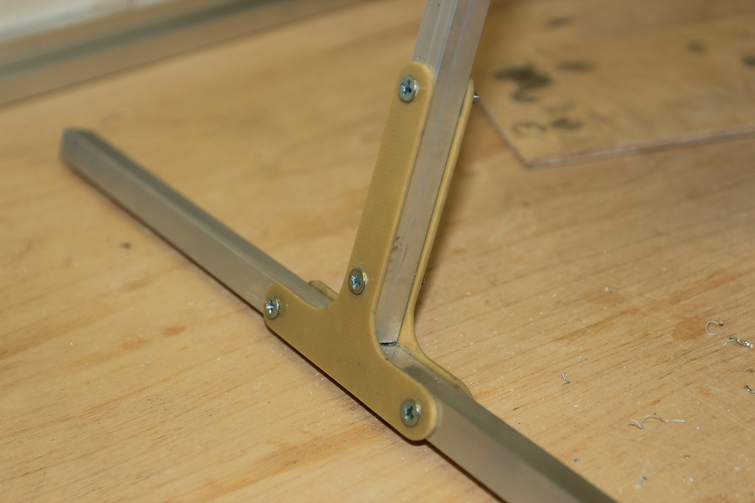
Чтобы стойка не казалась "дохлой" - натянул на неё теплоизоляцию для труб.

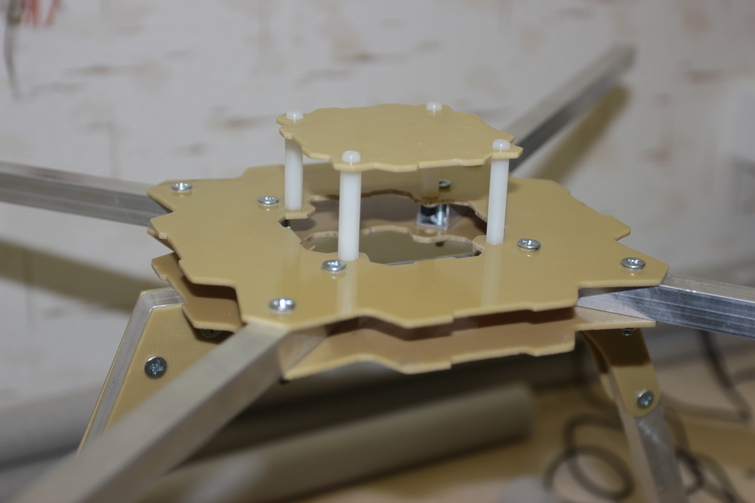
Пластину для стабилизатора посидил на нейлоновые стойки.
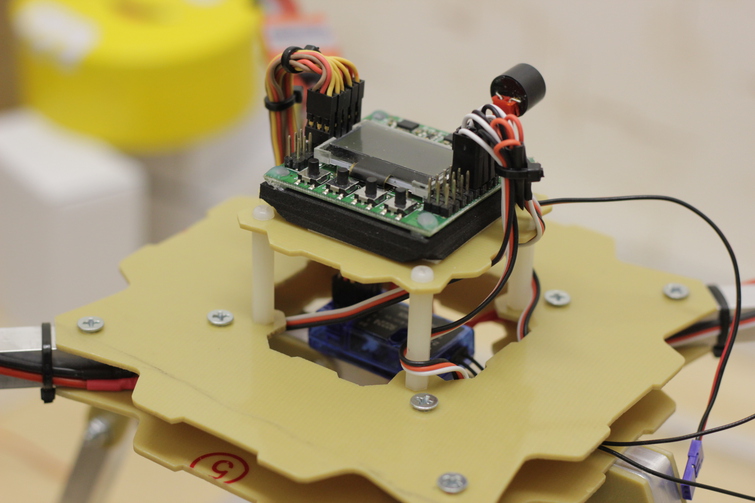
Всю электронику поставить не составило труда.
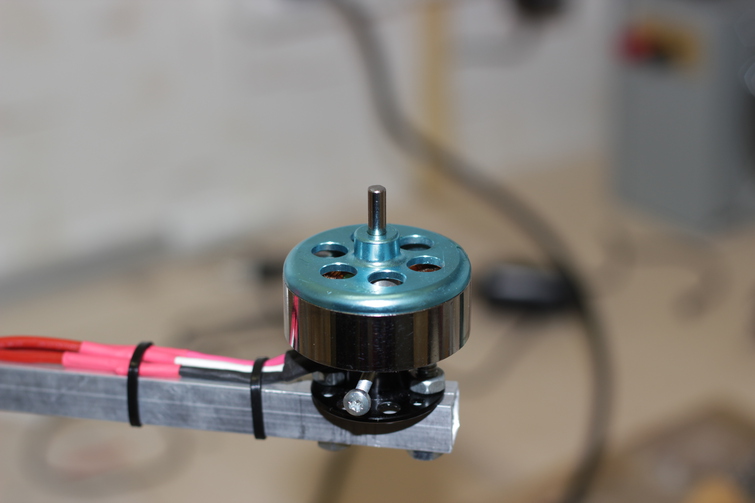
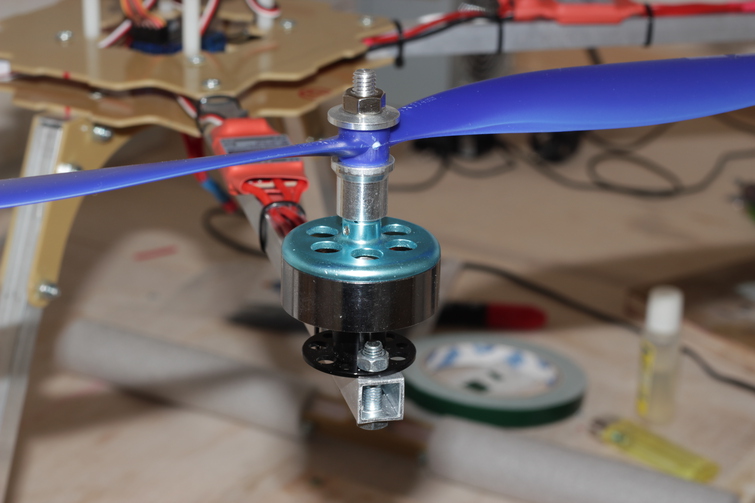
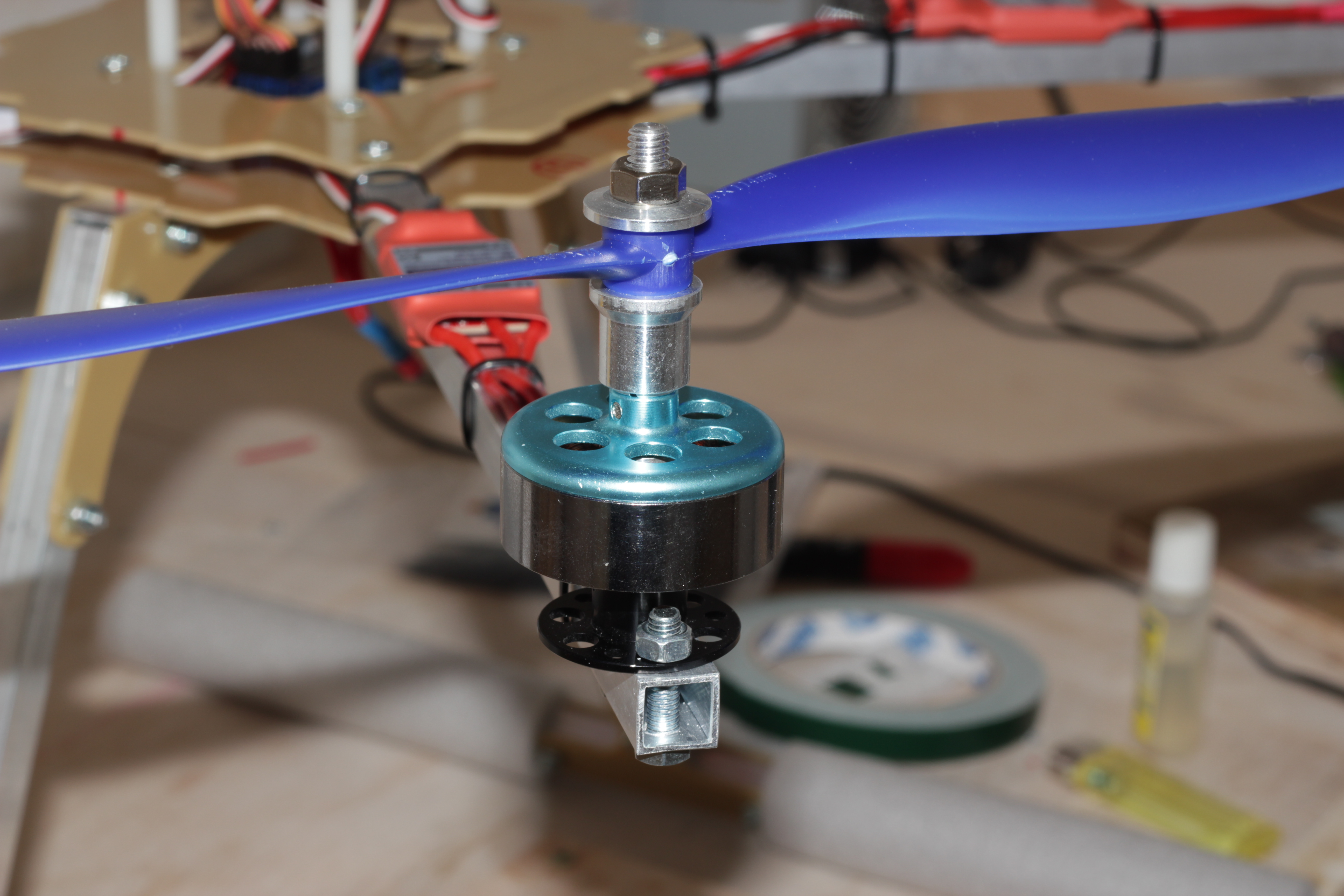
На старом коптере мучелся с установкой пропеллера. Решил укоротить ось моторчика и поставить адаптер. Натянул на мотор пакет, подложил магнит, взмахнул гравером и ненужная часть ось отлетела.
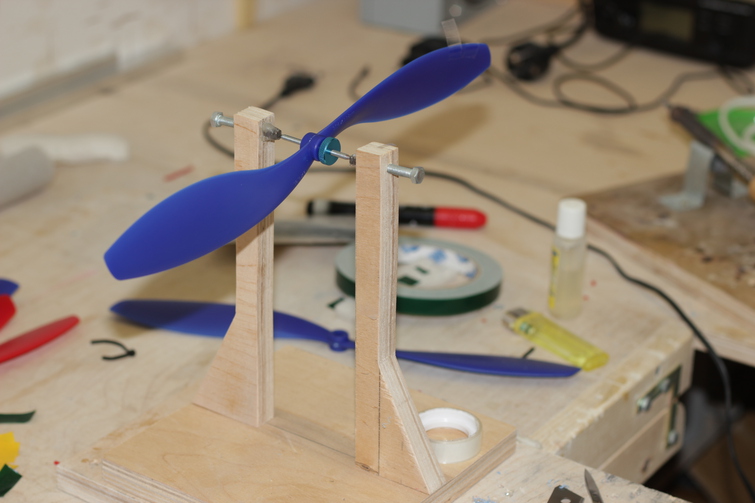
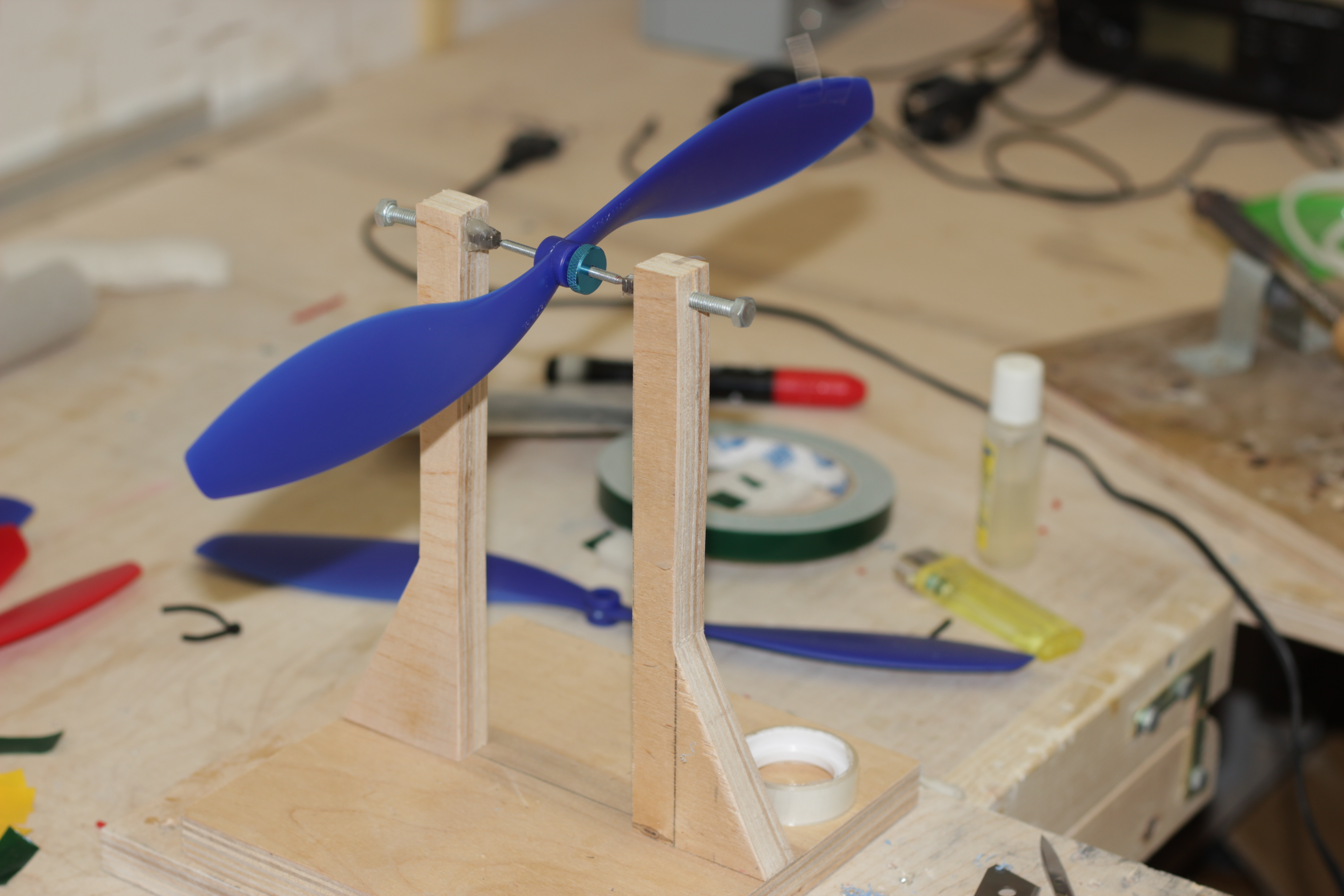
Отбалансировал пропеллеры.
Накинул адаптер с пропеллером на мотор, затянул. Правда кок у адаптера заменил гайкой.
А когда проверять стал, понял что подпаял моторы и контроллеры не так как следует. Не стал замарачиваться с програмированием контроллеров а просто поменял местами провода.
Подвес для камеры еще не готов, но планирую поставить со стабилизатором.
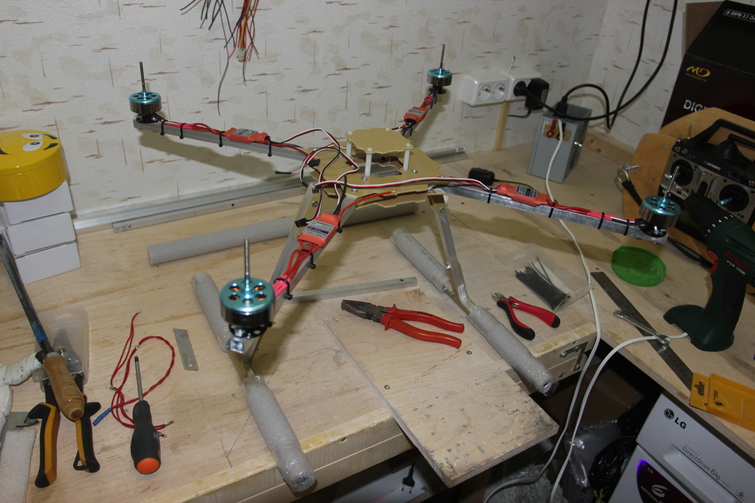
В итоге получился вот такой аппарат. В воздух еще не поднимал, так что уж извините что без видео.

=D
Мой первый коптер был сделан не продуманно и на скорую руку. Вот и решил всё сделать с нуля.
Аппарат получился 1950 грамм. От оси до оси мотора через центр 650 мм.
Контроллер взял KK2.0. прошивка 1.5.
Моторчики D4023-850 Out Runner Motor
Адаптеры Цанговый адаптер для крепления пропеллера на вал 4,0мм
Регуляторы Регулятор скорости TURNIGY Plush 30А
Пропеллеры Пропеллеры 12x4,5 SF (цвет синий) 2шт. стандартного вращения / 2шт. RH вращения.
Пропеллеры 12x4,5 SF (цвет красный) 2шт. стандартного вращения / 2шт. RH вращения
Два аккумулятора 3-х баночный 2200 mAh 30C
Нейлоновый стойки Нейлоновые резьбовые стойки 5.6мм x 30мм M3.
Винтики Nylon Screw Phillips Head M3x8mm (10pcs)
Нашел в интернете склад который продаёт стеклотекстолит, оргстекло и прочие материалы. Обрезки не продавали, пришлось купоть целый лист ст.текстолита 1500х1000х2мм. обошелся он в 800 рублей. По пути домой заскочил на рынок и затарился пилками для лобзика и аллюминиевыми профилями 12.5х12.5х1000мм.
На форумах посмотрел, кто какие рамы делает. понравилась вот такая ценая часть, но пришлось немного подрисовать. Нарисовал, распечатар, приклеил к листу, намотал тряпку на лобзик и начал пилилть.

С лучами было по-проще.
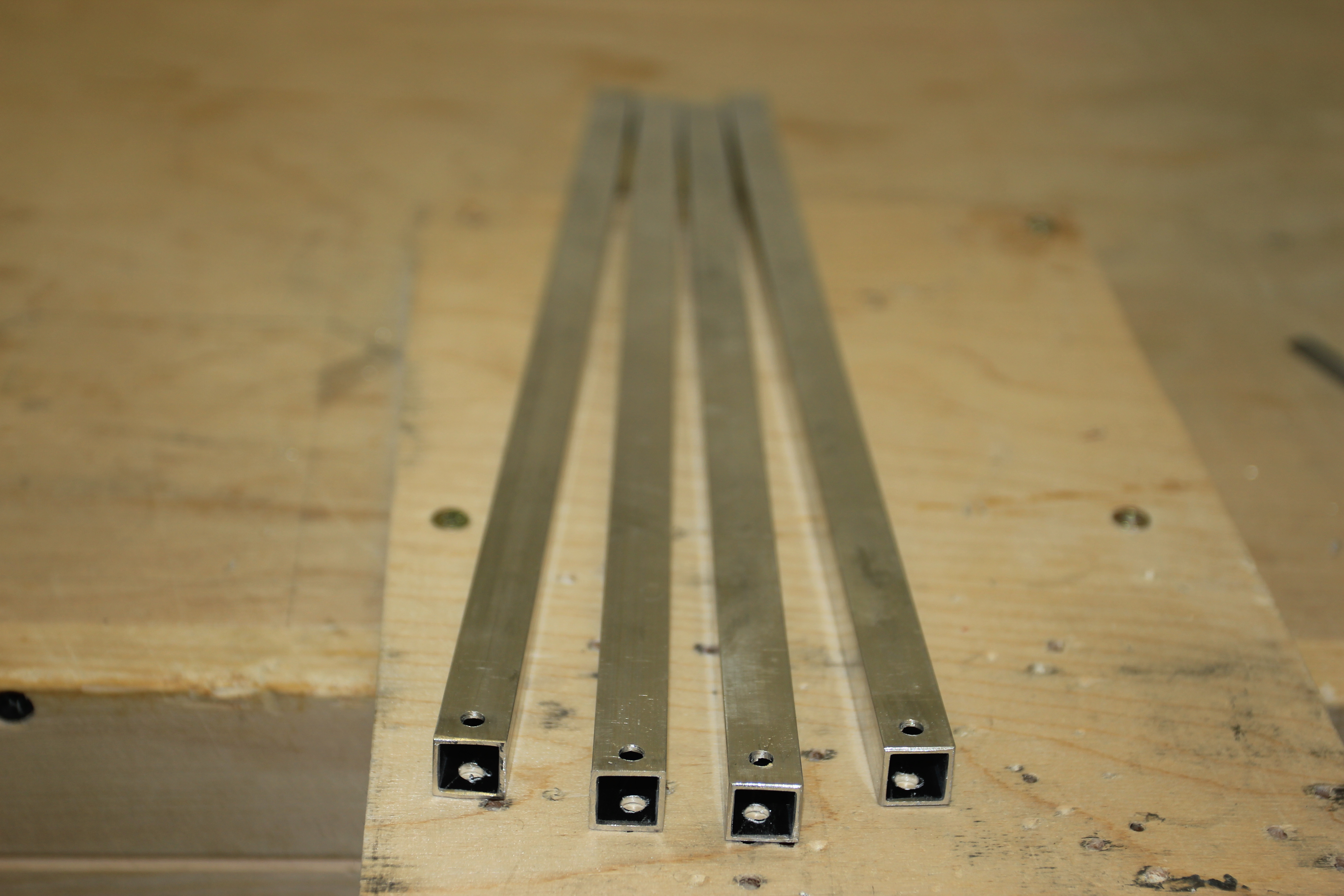
Сперва просверлил отверстия ближе к центру, прикрутил к пластинам и с помощью линейки и уголка выровнил лучи.
Вот что получилось.

Стойку собрал немного криво, глазомер подвел. Но с помощью натфиля все встало на своё место.
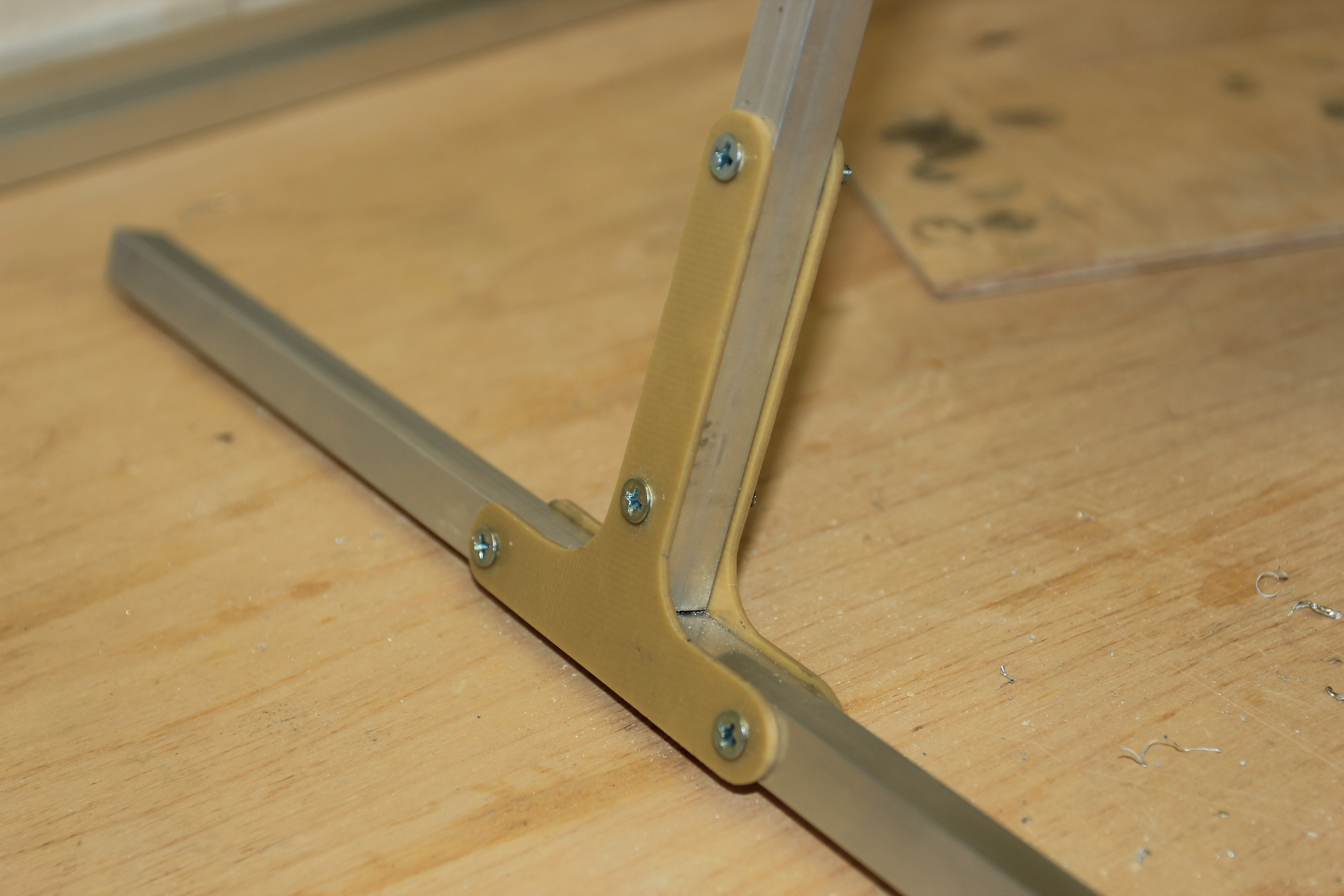
Чтобы стойка не казалась "дохлой" - натянул на неё теплоизоляцию для труб.

Пластину для стабилизатора посидил на нейлоновые стойки.

Всю электронику поставить не составило труда.
На старом коптере мучелся с установкой пропеллера. Решил укоротить ось моторчика и поставить адаптер. Натянул на мотор пакет, подложил магнит, взмахнул гравером и ненужная часть ось отлетела.
Отбалансировал пропеллеры.
Накинул адаптер с пропеллером на мотор, затянул. Правда кок у адаптера заменил гайкой.
А когда проверять стал, понял что подпаял моторы и контроллеры не так как следует. Не стал замарачиваться с програмированием контроллеров а просто поменял местами провода.
Подвес для камеры еще не готов, но планирую поставить со стабилизатором.
В итоге получился вот такой аппарат. В воздух еще не поднимал, так что уж извините что без видео.

=D













Исправлюсь.
Детали из текстолита тяжелые. Нужно было тоньше брать.
Кароче камера одна и её вес 196 гр.
и его полет
на цанги внимания не обращайте - жду пропы карбон 15шки.
Неплохие у вас моторчики. Не ужели 40А требуют. думаю что 25-30 за глаза.
есть немного желе при старте а в общем нормально
Вибрация идет из-за цанг, "бабочных" пластмассовых пропов и нуждающегося в балансировке одного движка.
На моем первом коптере, построенном на движках DT750 - была меньше вибрация (балансировал все движки).
Коптер - ещё в работе, это техническое видео и всего лишь второй его полет.
Блин - выяснилось, что в акке сдохла одна банка из 4. не могу на ней напругу поднять выше трех вольт. После зарядки отдельной банки напруга падает ниже двух....