Часть II http://www.parkflyer.ru/79798/blogs/view_entry/8135/
Контроллер.
Колличество деталей и проводом превзашло все ожидания.
да, ценник получился не самый гуманный, но что же делать.
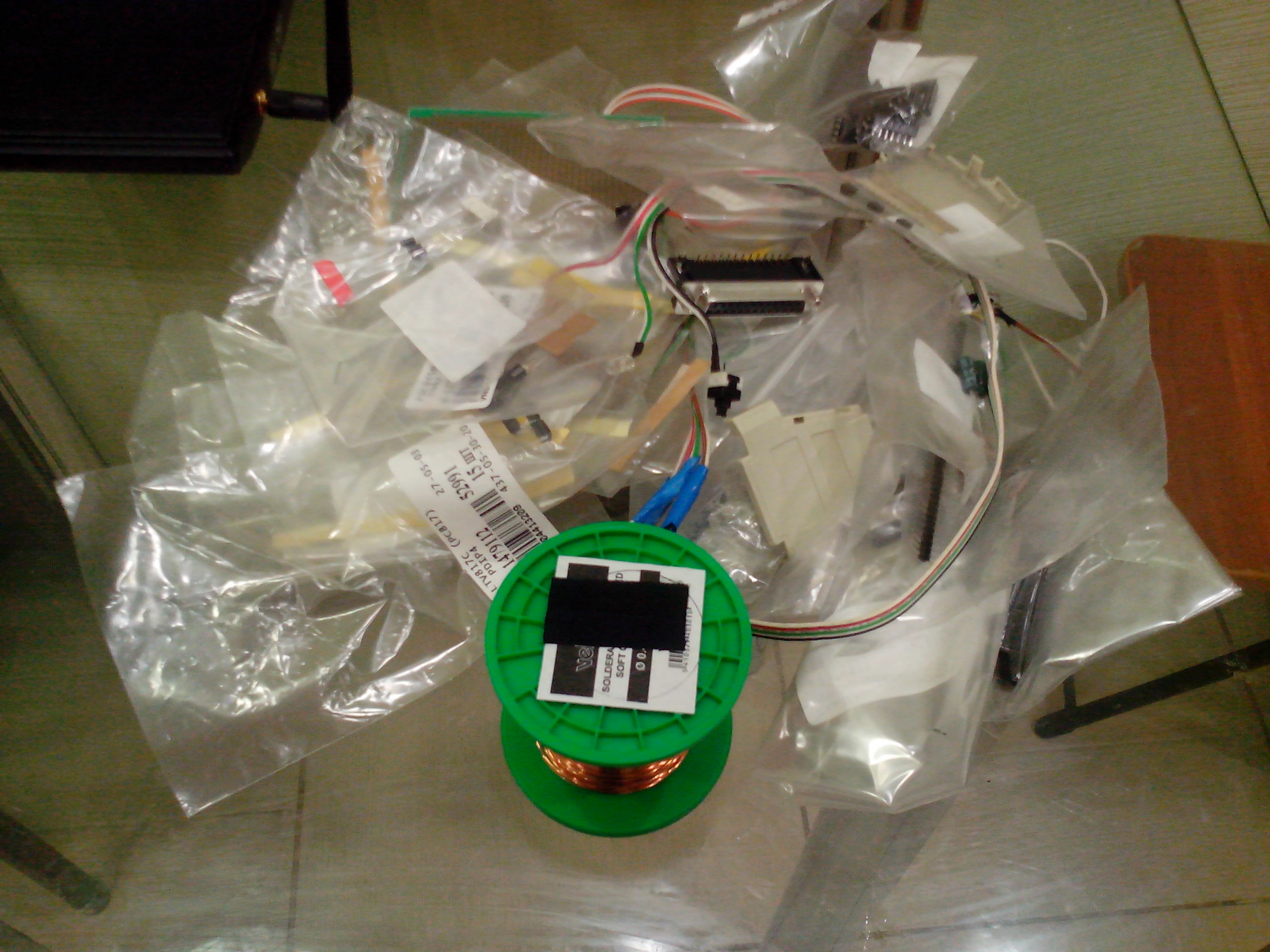
Долгожданный заказ был сформирован и прислан

В пакете оказалось еще больше пакетов:
Взявшись за паяльник, начался аккуратный и кропотливый процесс. Проверка правильности на каждом этапе сборки. Хочу отметить, что разводить плату не стал, во-первых не умею, во вторых здесь не так много элементов, да и не известно, заработает ли сам контроллер.
А разводить, потом травить плату дело не простое, на монтажке будет быстре
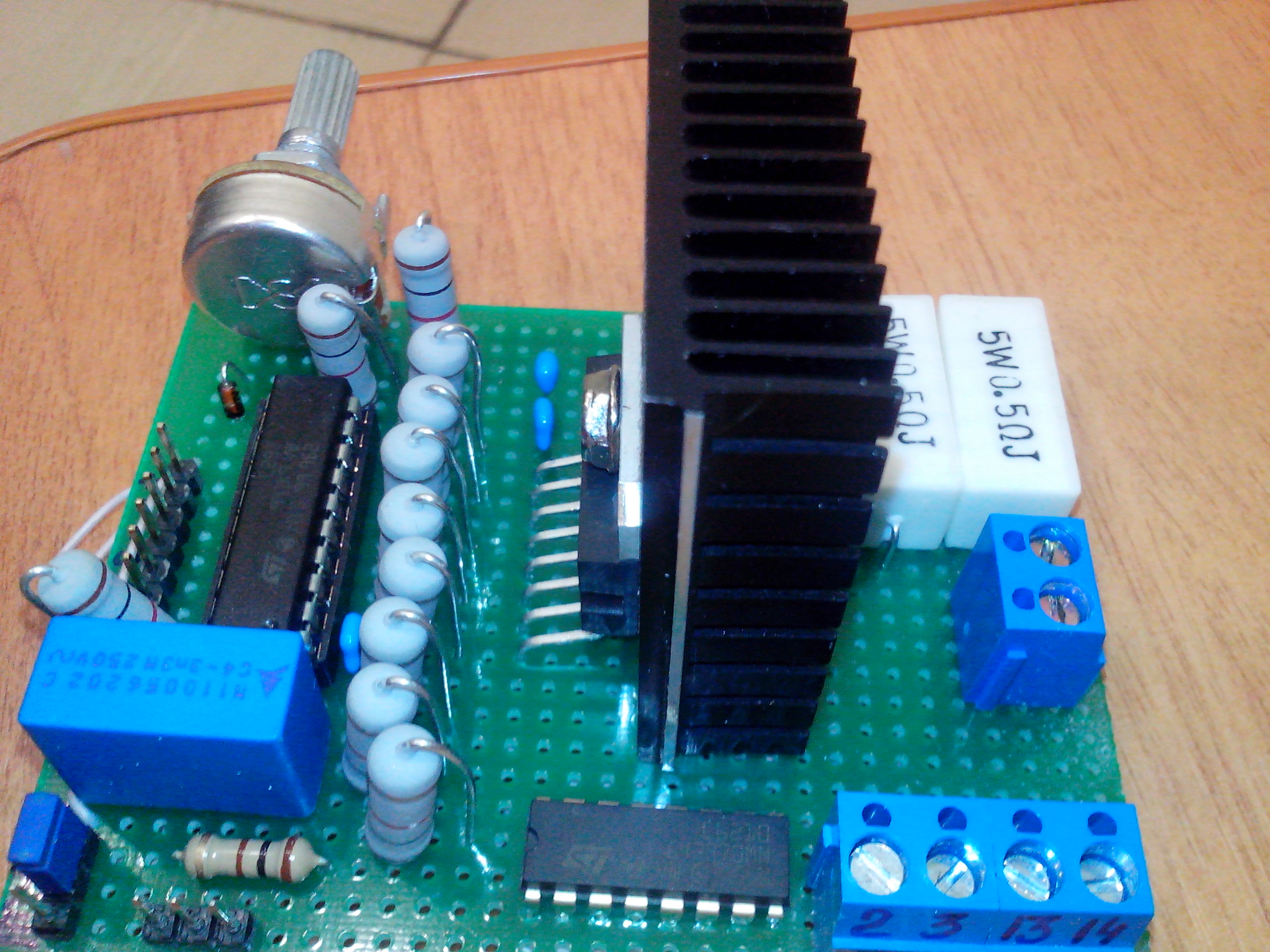
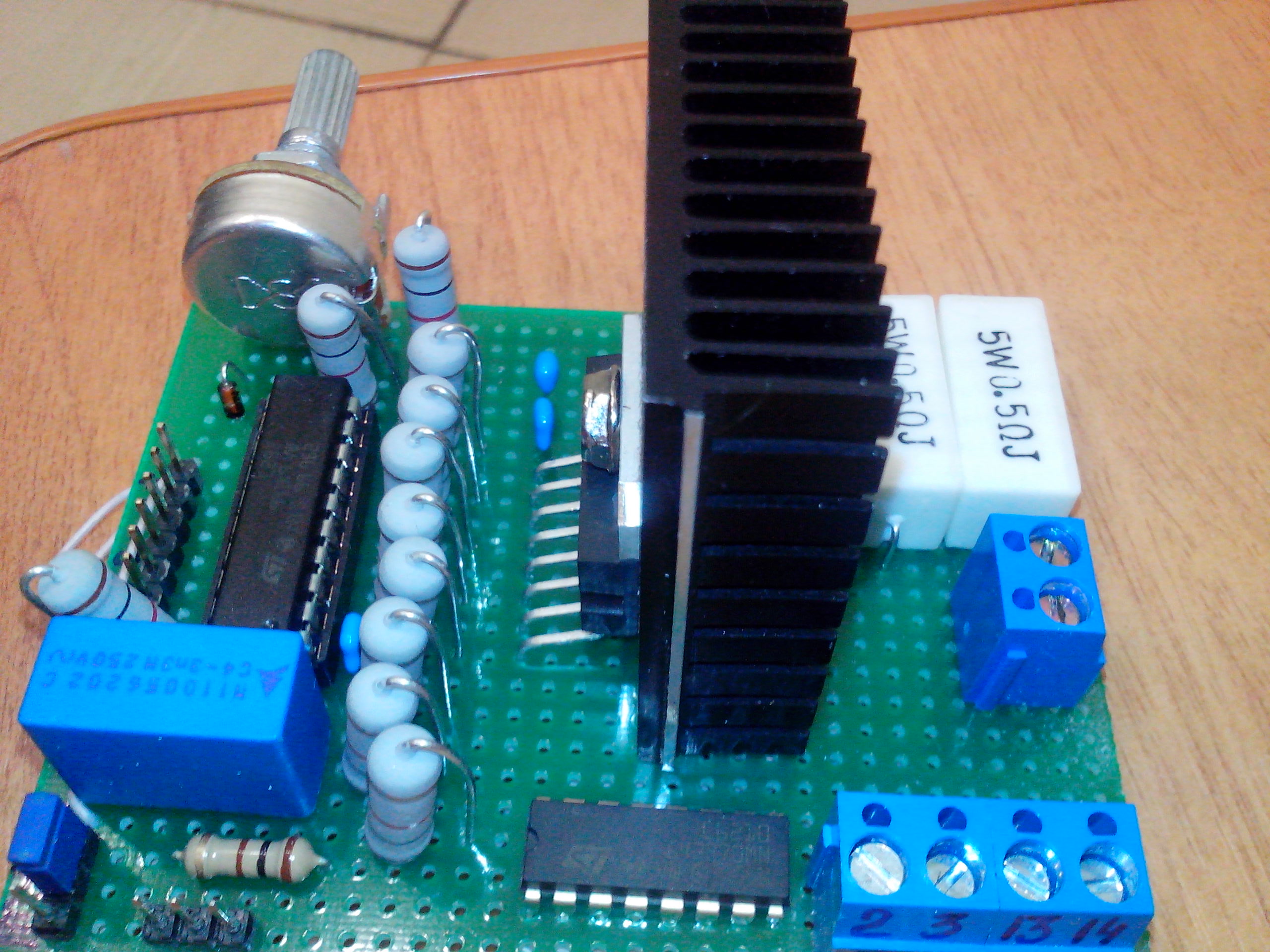
ну вот, можно сказать что то получилось. Для проверки правильности идеологии схемы, достаточно пока одной платы, если эта заработает, то изготовить еще две не составит большого труда.
Что бы драйвер не грелся необходимо установить разгрузочные резисторы на на 3 и 14 вход.
Что бы рассчитать резисторы нам надо знать следующее:
V1 - напряжения питания ШД -12В
А1 – максимальная нагрузка на канал – 2А
R1 – сопротивление обмотки мотора – 1,56
Ну и схема подключения обмоток. Так как у меня моторы ДШИ-200-1-1 а это универсальный мотор с 4-мя обмотками, то есть в зависимости от того как подключить обмотки мой ШД может быть биполярным или униполярным (об моторах я писал в первой части).
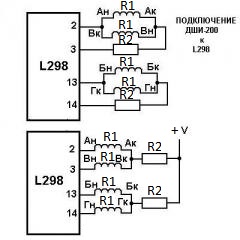
Я подключаю по первому варианту.
Рассчитываем резисторы следующим образом:
находим сопротивление на контроллере: 12В/2А = 6 Ом
так как у нас параллельное соединение обмоток, то сопротивление обмоток будет: 1,56 Ом/2=0,78 Ом, округляем и получаем 0,8 Ом
R2 = 6 Ом-0,8 Ом=5,2 Ом
таким же образом, можно рассчитать R2 при любом напряжение питания мотора. Но только если обмотки подключены параллельно.
Если у вас получился резистор, которого нет в каталогах то выбирается ближайший по значению в пределах 5%
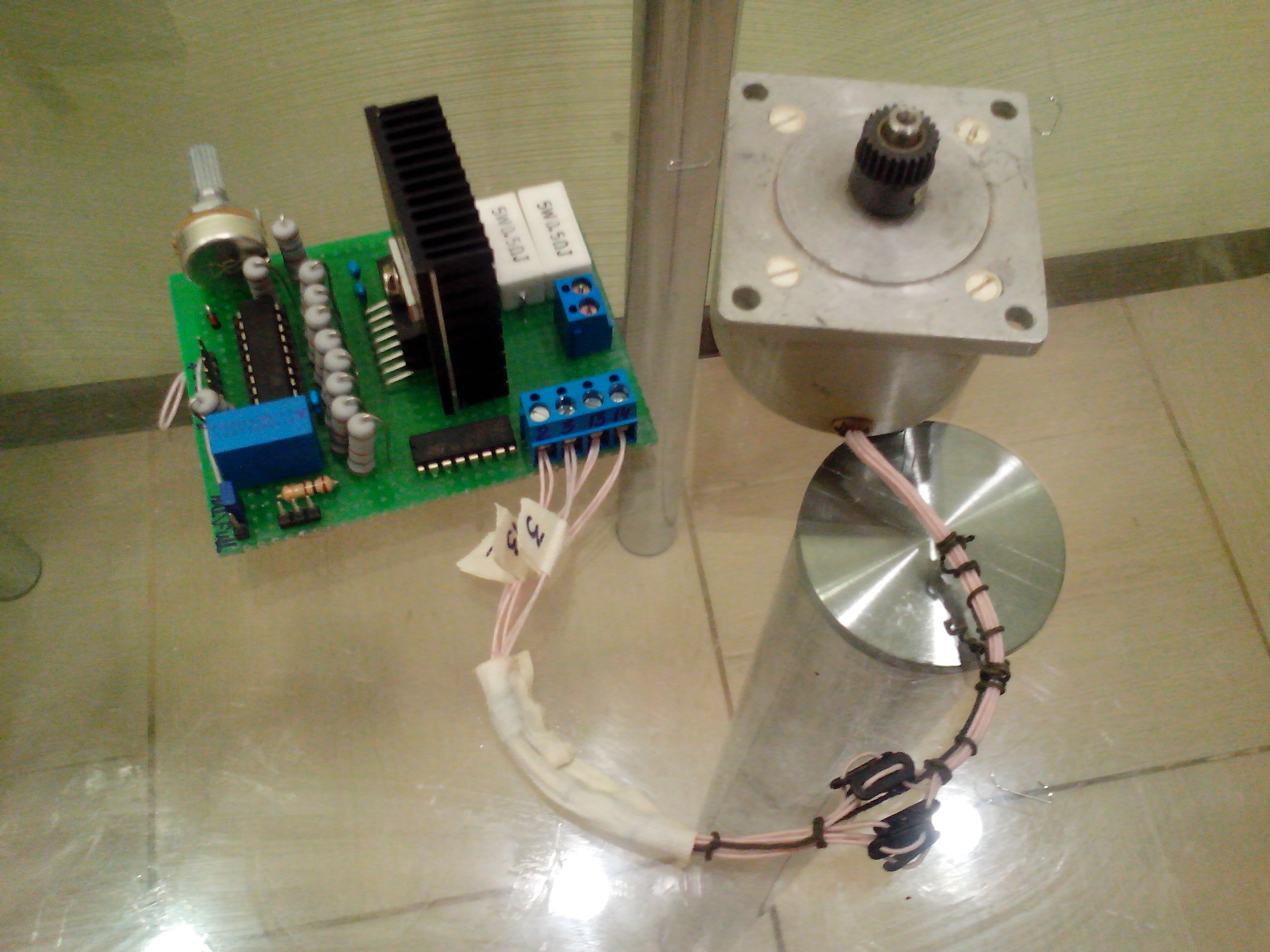
Проверить контроллер можно следующим образом:
- ставим перемычку на J2 в положение "Hall" полный шаг
- подаем +5В на J1 на первый пин, -5В на второй и третий пин, пятый и шестой пины +5В
- Подаем питание на сам мотор (в моем случае 12В)
после этого мотор должен встать на режим удержания и его руками будет не провернуть.
Если этого не произашло, смотрите монтаж или правильность расчета сопротивления R2.
Убедитель что радиотар не сильно греется.
- кратковременно подавая +5В на четвертый пин (можно через кнопку) на разьеме J1
при нажатии на кнопку мотор должен делать шаг.
Теперь контроллер можно подключить к компьютеру. Но как?! Есть два решения:
Напрямую в LPT порт
Или через интерфейсную плату
Ответ очевиден, интерфейсная плата, так как подключив напрямую, если что то пойдет не так, до свидание комп. Решено, делаем интерфейсную плату.
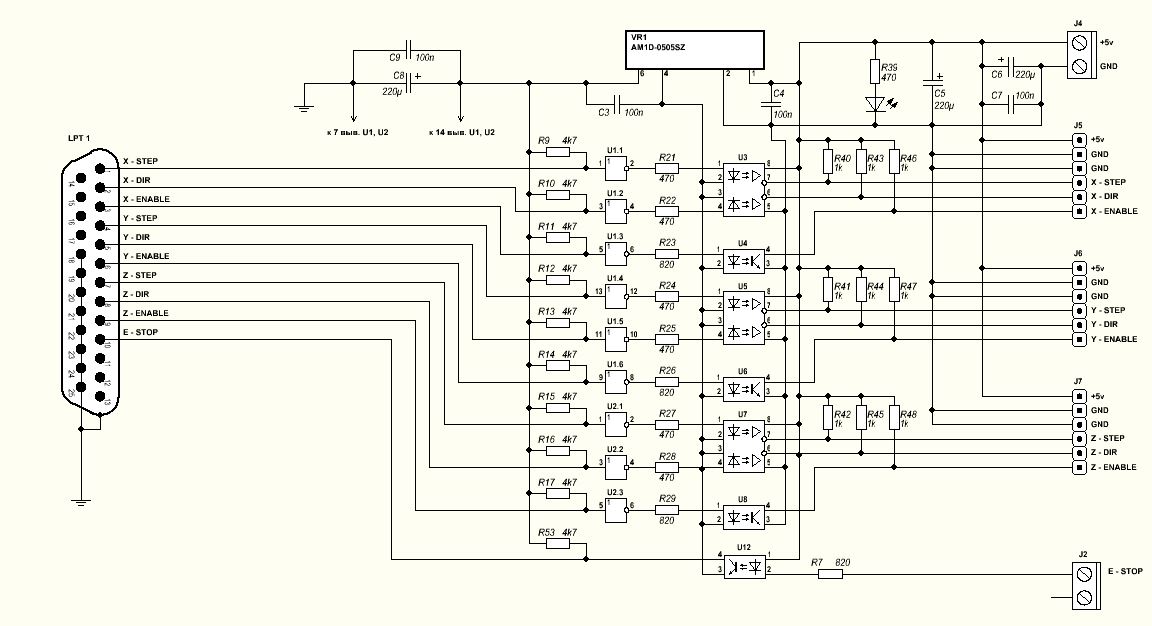
Интерфейсная плата реализована на опторазвязке.
Пока наворачивать не стал, оставил свободные каналы для концевиков нулевых координат, и пару каналов для включения шпинделя и пылесоса. в любом случае, плату потом можно будет доработать
вот схема:
Скачать (интерфейсная плата.spl)
Элементы не указанные на схеме:
U1, U2 - 74HC14
U3, U5, U7 - HCPL2630
U4, U6, U8 - U11 - PC817
Конденсаторы С8 и С3 старайтесь ставить как можно ближе к микрухам, что бы минимизировать индуктивность проводника питания микросхемы.
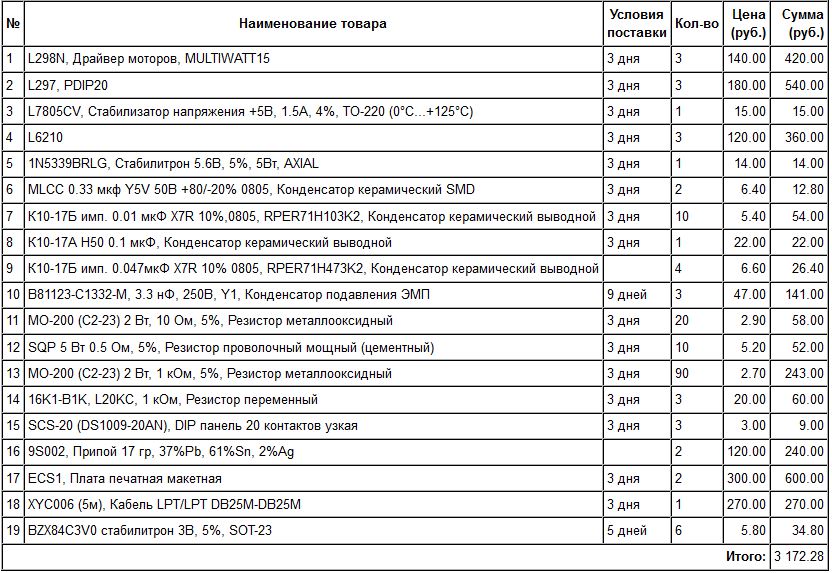
цены на комплектующие:
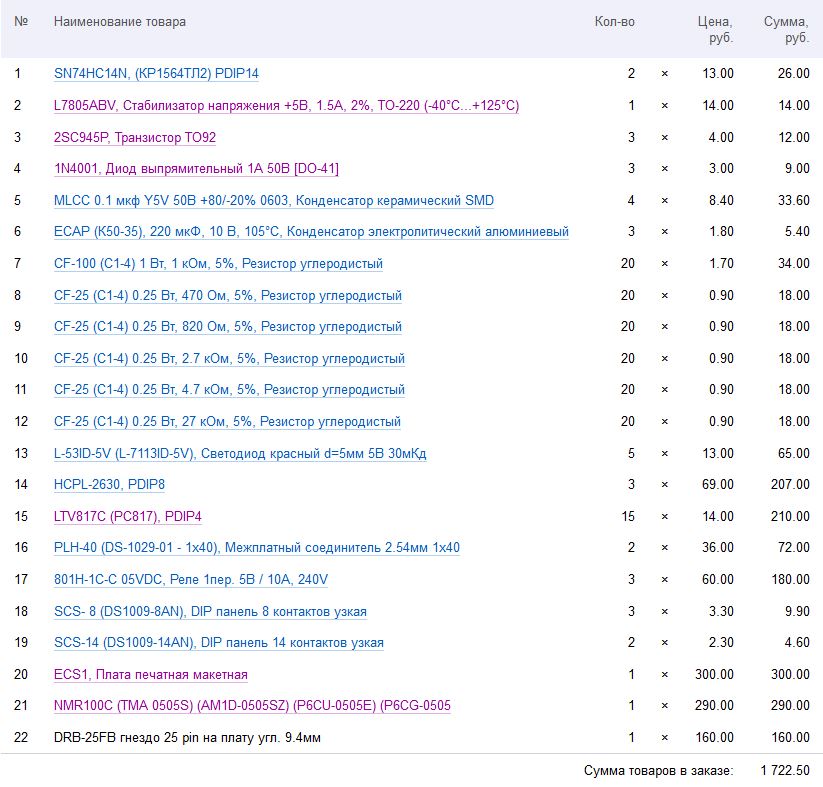 Возможно у вас это будет и дешевле и не весь набор, но у меня ничего не было из необходимых компонентов.
Возможно у вас это будет и дешевле и не весь набор, но у меня ничего не было из необходимых компонентов.
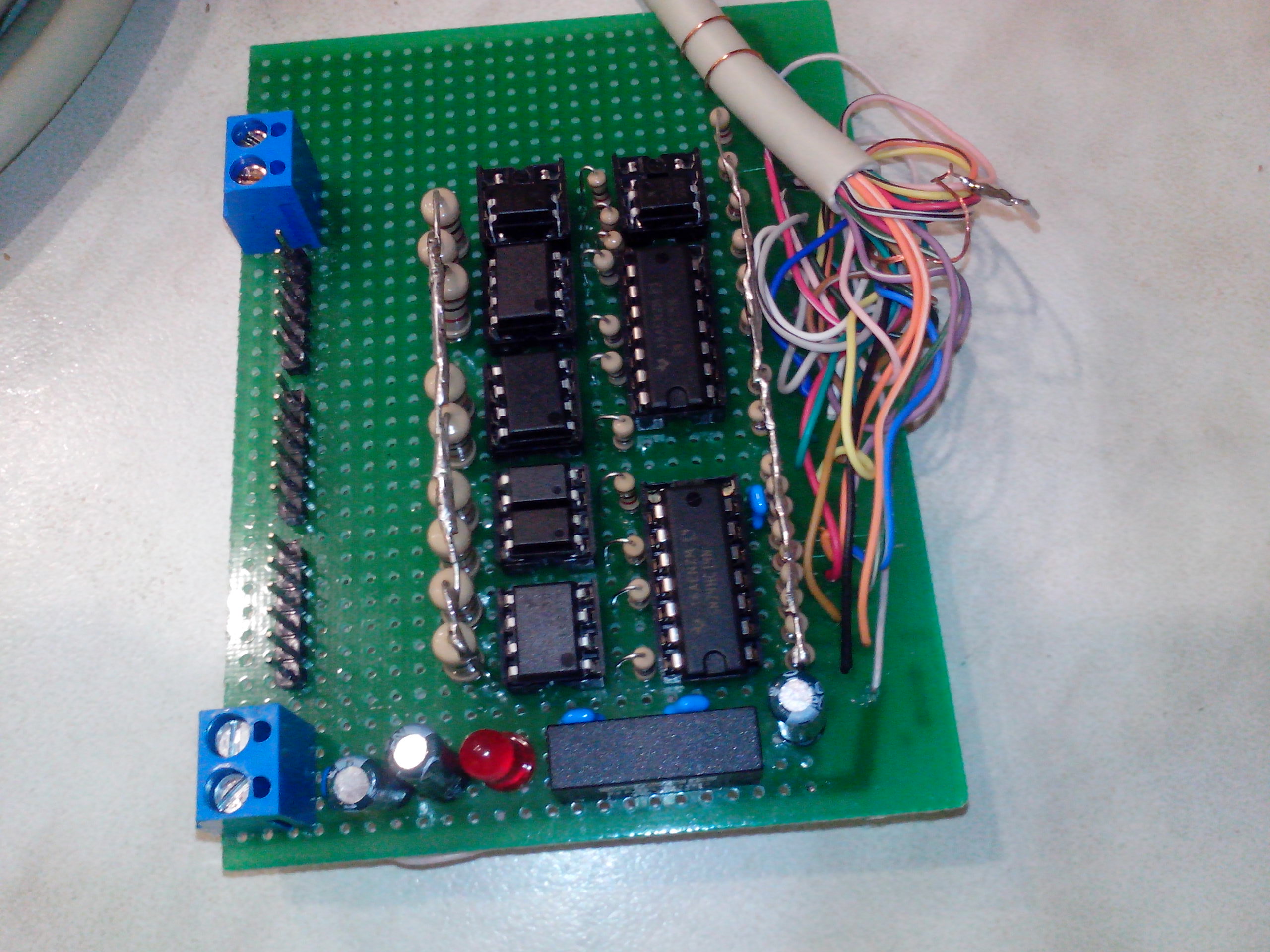
Вот как она выглядит:













А что вы думаете про этот драйвер PLC330LPT http://purelogic.ru/shop/elektronnye_komplektuyuwie/mnogokanalnye_drajvery_shd_dlya_chpu/drajvery_s_interfejsom_lpt/
У вас вероятно большой станок?
- в жгуте не должно быть силовых проводов
- в начале поставить ферритовое кольцо
Что касаемо ссылок, данные девайсы не совсем то что бы хотелось не вытянут мощные моторы, этот же контроллер позволяет подключать любые, достаточно установить соотношение сопротивление обмоток двигателя и самого контроллера, плюс здесь есть ШИМ, обеспечивающий частоту и скорость вращения, можно регулировать опорное напряжение
Такой не проще использовать? И ценник гуманнее получается.
Как и сказано в описании (http://rc-master.ucoz.ru/publ/10-1-0-83) вполне неплохо управляет шаговым движком.
P.S. Минусы не мои. Идея интересная. Но начать бы стоило с механики. И не стоит делать "Санта-Барбару". Из этих трех частей вполне можно было бы сделать одну. И дополнить ее еще подключением и кодом управления с МК.