Как известно, разводка питания в контроллере APM 2.5 выполнена следующим образом:
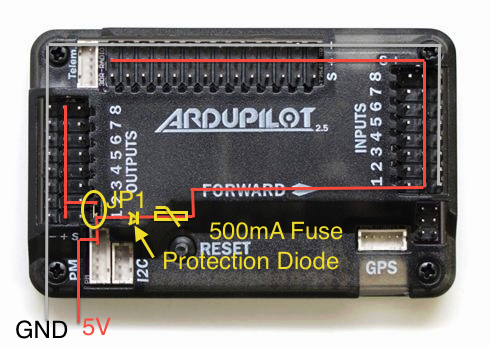
Шина Outputs и разъём питания (PM) отделены от внутренней шины защитным диодом и предохранителем. При подаче питания с ESC или разъёма питания на диоде и предохранителе создаётся постоянное падение напряжения порядка 0.3-0.4В. Именно поэтому, при подаче питания через разъём PM, напряжение на модуле UBEC должно быть 5,3-5,4В. Как вариант, можно подавать питание на контроллер с отдельного UBEC 5.0В, непосредственно на внутреннюю шину, то есть подключить его к выводам питания шин Inputs или Analog, но прошу заметить, я вам этого не советовал.
Исследуем классический вариант подачи питания контроллера, через разъем PM. Вообще в радиоэлектронике считается "плохим тоном" в сильноточные шины и шины с большими пульсациями тока, ставить последовательно диоды, но разработчики контроллера решили именно так, и это действительно оправдано в данном случае, так как иначе пользователи жгли бы UBEC или порты USB при их одновременном включении, к тому же это хоть и «кривая», но защита от переполюсовки источника питания.
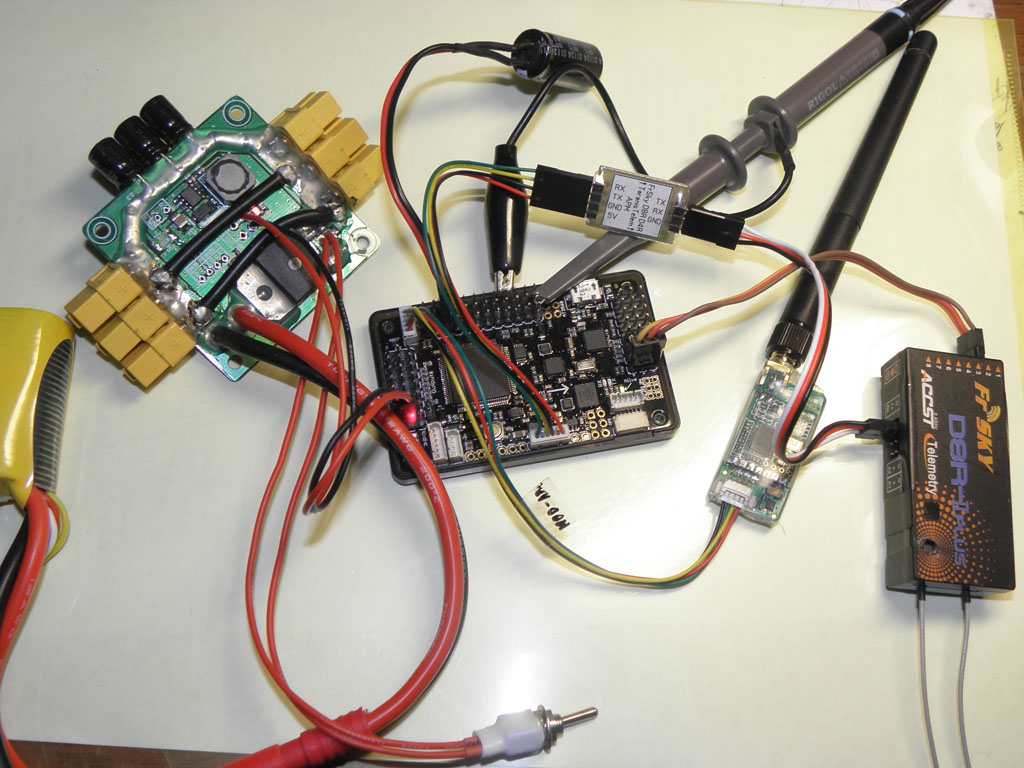
Измерения проводились на полностью собранном квадрокоптере с полётным контроллером HexTronik HKPilot Mega V2.5 и подключенным к нему нижеследующим оборудованием:
1. Система телеметрии 433МГц на UART0
2. Сонар HRLV-MaxSonar-EZ на А0
3. GPS-модуль UBLOX LEA-6H
4. Конвертер Mavlink-to-FrSky на UART2
5. Приёмник FrSky D4R-II с телеметрией в режиме CPPM
6. Регуляторы Afro ESC 30А
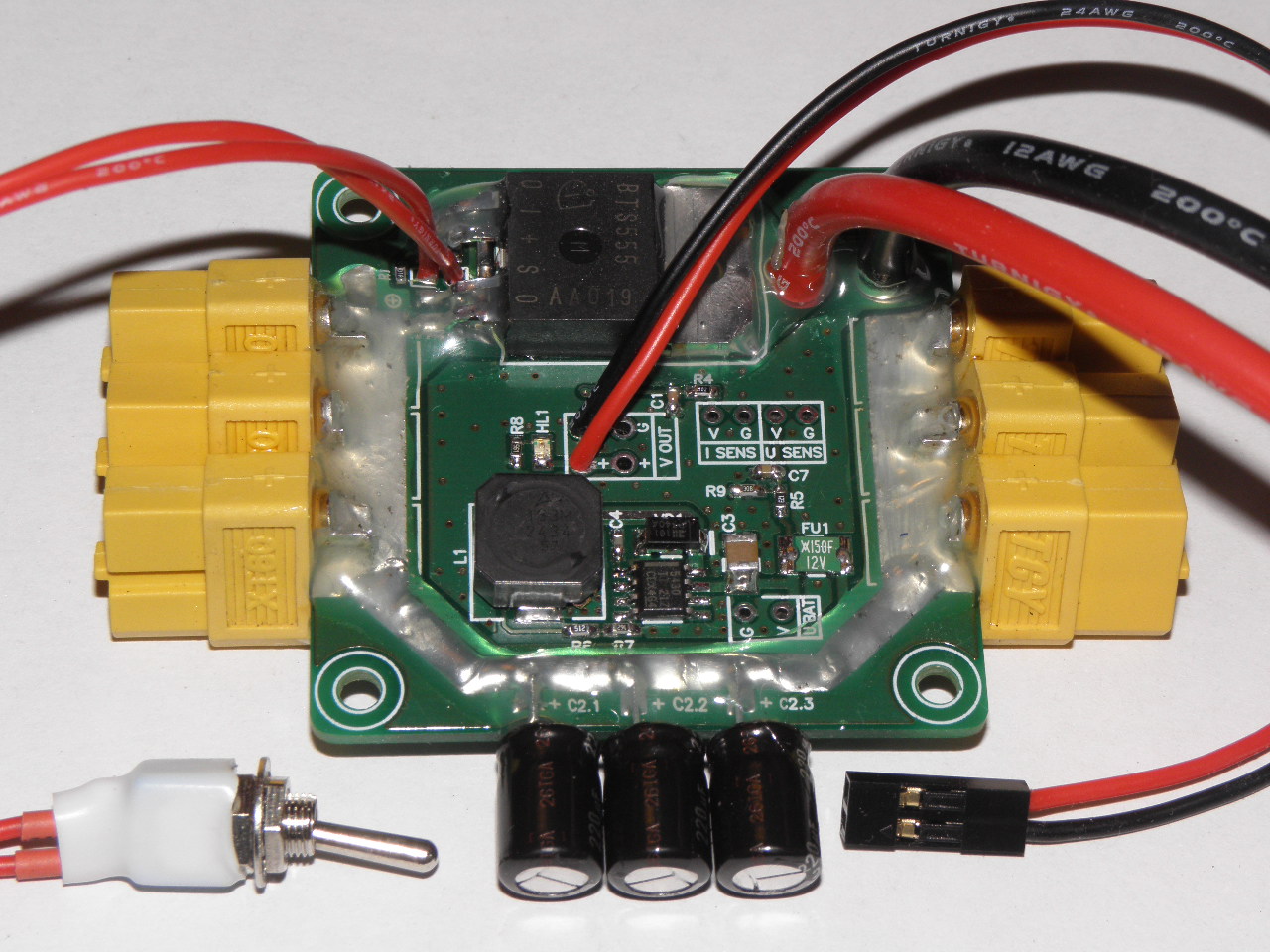
7. Плата питания с ключом на BTS555 и малошумящим UBEC на TPS5430
8. Маломощные светодиоды на А6 и А7
В качестве измерительного прибора использовался осциллограф RIGOL DS1052E, щуп подключался на шины Outputs и Analog. Во время измерений запускался MissionPlanner с подключением к контроллеру через модемы телеметрии.
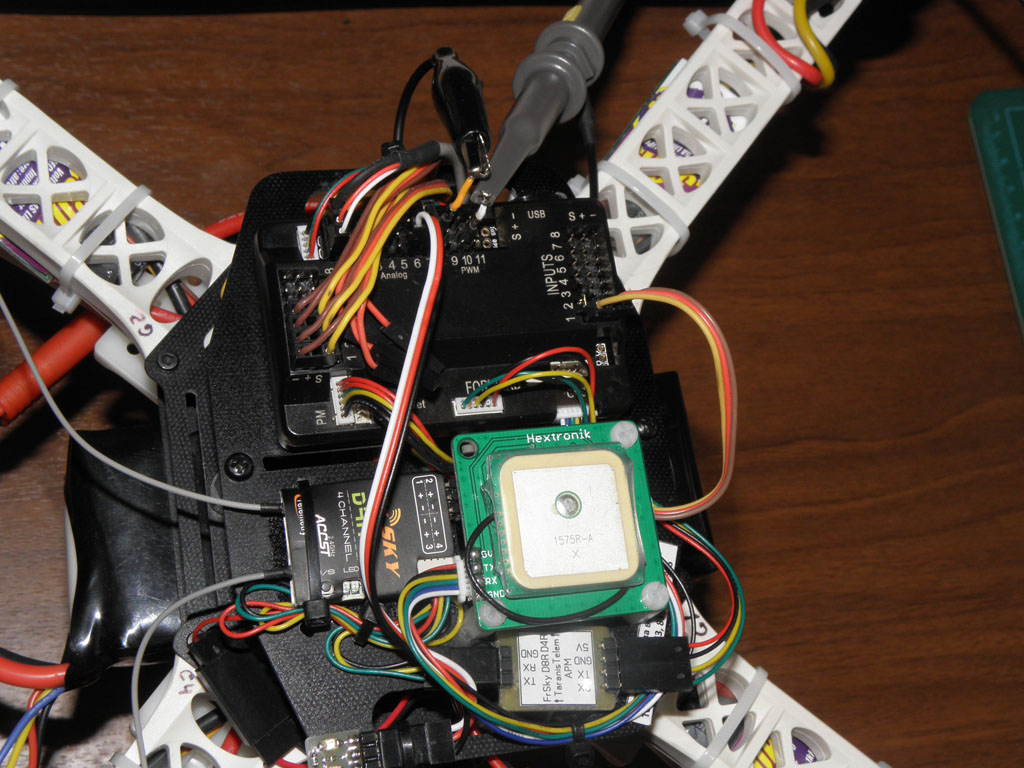
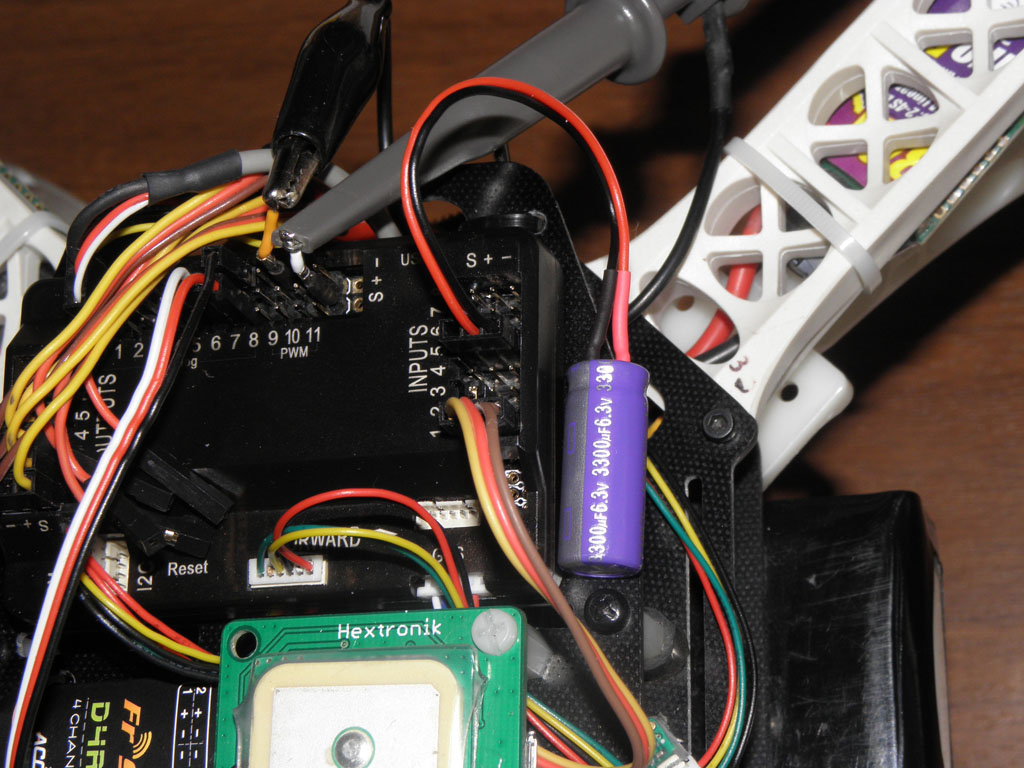
Вид сверху собранного квадрокоптера, с подключением щупа осциллографа на шину Analog:
Плата питания установлена внутри рамы и выглядит так: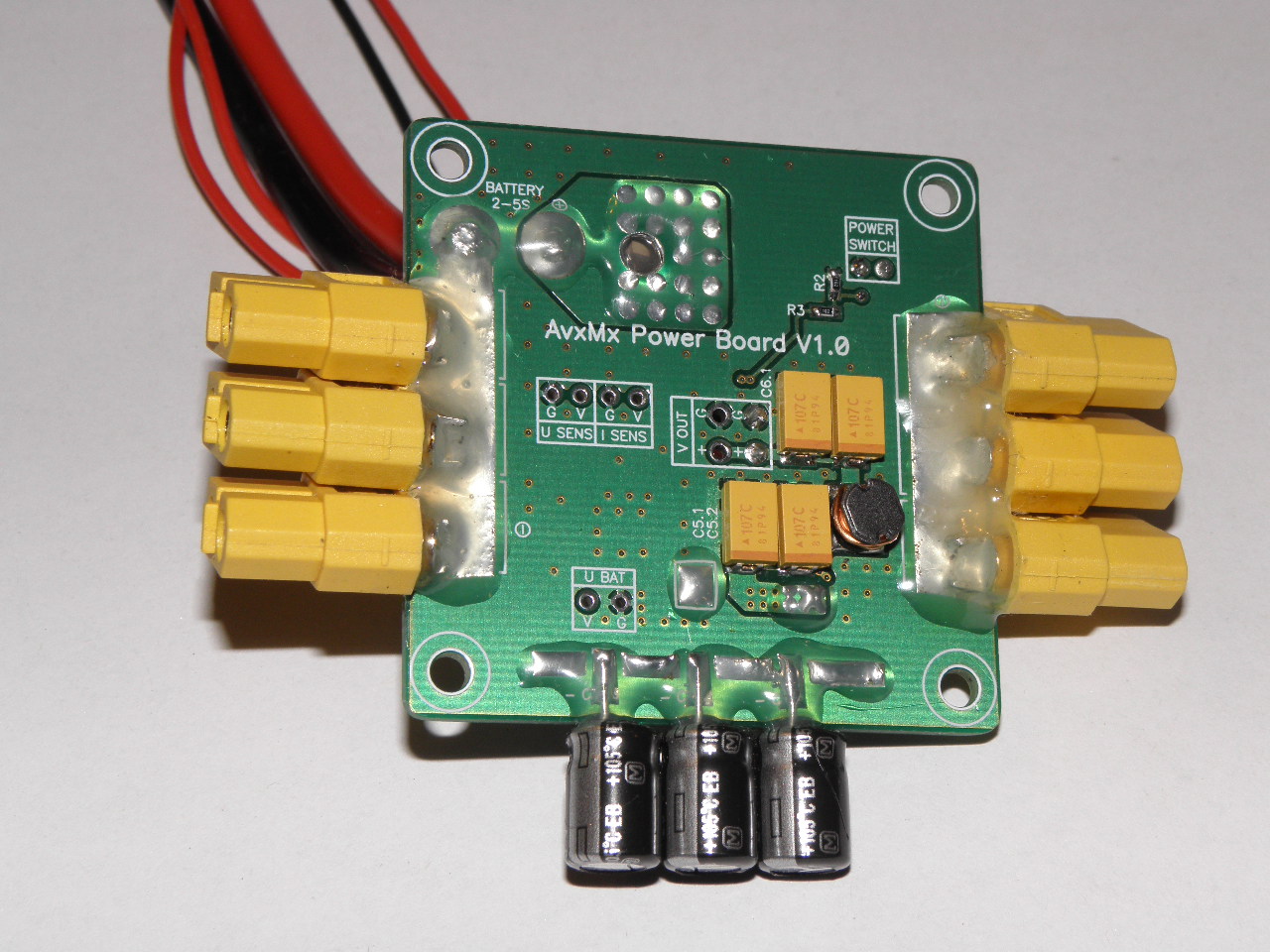
Сначала было произведено измерение на шине Outputs:
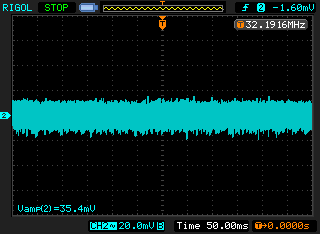
Уровень пульсаций составил 35 милливольт, что в общем, достаточно хороший результат. Например, спецификация ATX допускает уровень пульсаций 50 мВ на выходе компьютерного блока питания по шине 5В при максимальной нагрузке, то есть не более 1% от величины напряжения питания.
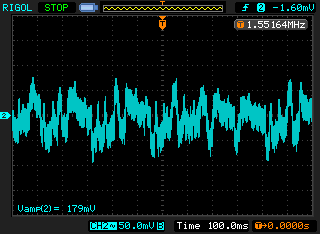
Затем произведён замер на внутренней шине Analog: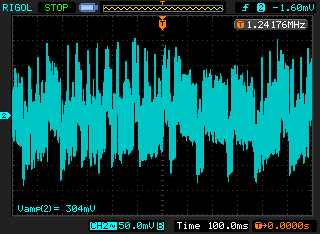
Уровень пульсаций доходил до 320 мВ, что превышало уровень входных пульсаций с платы питания в 9 раз, и составляло 6% от уровня входного напряжения. Это очень много, хотя при этом квадрики на APM летают, без крупных сбоев, в основном ... Впрочем основные датчики сидят на шине 3.3В, иначе им было бы «очень плохо», но нет уверенности в том, что такой уровень пульсаций в сочетании с какими либо электромагнитными помехами, не могут «повесить» контроллер или привести к его сбоям.
Путём отключения и подключения оборудования, выяснилось, что наибольшую долю пульсаций вносит модем телеметрии. В общем, это ожидаемо, так как в момент отправки данных, при выходной мощности 100 мВт, модем создаёт большие пульсации тока, а когда шина питания контроллера, развязана диодом, то большой ток на внутренней шине контроллера, просто просаживает напряжение до текущего прямого напряжения диода на данном токе. После того, как ток в цепи питания уменьшится, напряжение опять подтягивается до большего значения.
Вот график зависимости прямого напряжения от тока, диода MBR120, который установлен в контроллере. На контроллере без периферии у меня на нём падало по постоянке 0,26В с периферией 0,4В: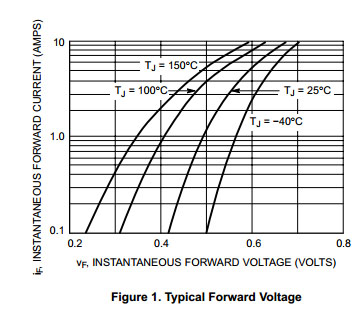
Установка фильтров на периферии (модем в частности), почти ничего не даёт, так как у него длинные пакеты, и сгладить пульсации тока в нем самом проблематично. Мне видится единственное решение сгладить пульсации на шине 5В контроллера, которая развязана от источника питания диодом - шунтирование её ёмкостью. То есть смысл в том, чтобы ток на шине перед диодом не пульсировал, чтобы обеспечивать всегда одно и то же значение прямого напряжения последовательно включенного диода.
Из осциллограммы видно, что большие просадки по напряжению низкочастотные, длительностью до 20 мс и более, компенсировать которые можно установкой конденсаторов большой ёмкости, поэтому в шину Inputs был установлен конденсатор 3300 мкФ, 6.3В:
Уровень пульсаций при этом упал почти в два раза, однако всё ещё, имел довольно большое значение:
Также высокочастотная составляющая шума имела большую амплитуду, поэтому было решено, продолжить борьбу с пульсациями. Для этого, с обратной стороны платы между всеми контактами + и - шин питания, были установлены керамические SMD конденсаторы типоразмера 1206 на 10 мкФ 16В, вот такие:
Такое решение позволило набрать приличную ёмкость, без какого либо увеличения габаритов. Согласен, решение не стандартное, может даже дорогое и не оправданное, но применительно к данному случаю, мне оно понравилось. Конденсаторы пришлось ставить на ребро, так как по-другому, красиво впаять их не получалось: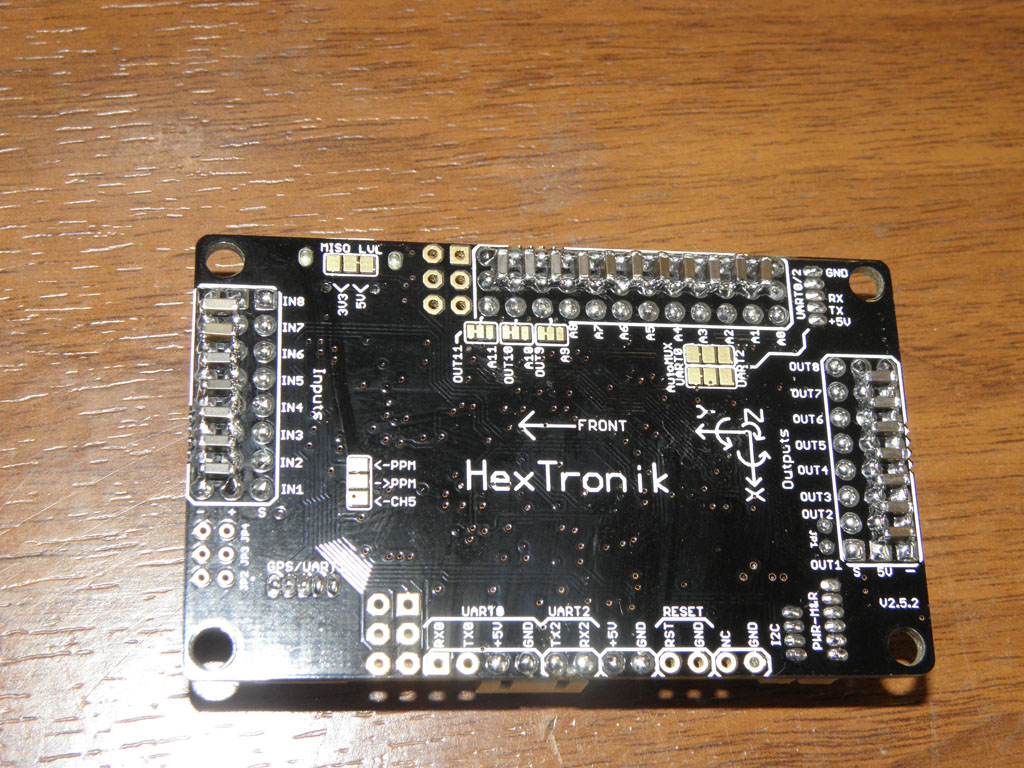
Также с лицевой стороны платы был установлен электролитический конденсатор 220 мкФ 10В диаметром 5 мм, к сожалению большего номинала и размера установить не удалось, иначе корпус не закрывался:
Суммарная ёмкость конденсаторов составила 470 мкФ. Хотя 8 из них висят в шине Outputs, в моём случае они там были не особо нужны.
После этого контроллер был установлен на место, всё подключено как было, кроме внешнего конденсатора. После включения и запуска обмена по телеметрии, результат был такой:
Порадовало то, что конденсаторы на контроллере значительно лучше гасят пульсации, чем внешний конденсатор большой ёмкости, так как кроме низкочастотной составляющей, хорошо справляются и с высокочастотной, за счёт применения керамических конденсаторов и расположения их непосредственно на плате.
С подключенным внешним конденсатором, результат стал лишь немного лучше:
В итоге, удалось добиться уровня пульсаций не более 90 мВ, что в 3.5 раза меньше, чем было.
Стоить отметить, что с запущенными на 50% газа двигателями (с пропеллерами), уровень пульсаций не увеличивался, при этом потребляемый ток составлял 14-15А. Это значит, что силовая часть платы питания и регуляторы, не оказывают существенного влияния на UBEC и контроллер.
Выводы:
1. При питании контроллера APM 2.5 через разъём PM, установка конденсатора большой ёмкости на внутреннюю шину 5В контроллера, это самый быстрый и мало затратный способ, существенно уменьшить уровень пульсаций напряжения на шине питания и как следствие, увеличить надёжность и отказоустойчивость контроллера.
2. Модем телеметрии вносит наибольший вклад в уровень пульсаций по шине питания, при его использовании, необходимы дополнительные меры по фильтрации питающего напряжения на внутренней шине 5В контроллера.
3. Керамические конденсаторы на шинах питания контроллера и небольшой электролитический конденсатор, установленный непосредственно на плату контроллера, лучше справляются с импульсными помехами, чем внешний электролитический конденсатор большой ёмкости.
И на последок: Я вам не советую выполнять описанные модификации контролера APM, это лишь повод для размышления, если вы что-то предпримите, то на свой страх и риск.













Я так мыслю:
Идеальный коптер питается через 2 DC-DC преобразователя - на 5 и на 12 вольт. 5 вольт заводим на контроллер, через него питаем только маленькую нагрузку - датчик GPS, модем, блютуз (при наличии). Сервы, приемник, OSD - питаем только напрямую с DC проеобразователя на 5 вольт. Видеосистему питаем с 12 вольтового преобразователя (акки 4S и более) (не с беков регулей). Регули - высоковольтные изначально, подключаются к батарее напрямую.
Какую/какие ёмкость/ёмкости мне куда добавить, чтобы мой АРМ не глючил?
(за статью безусловно плюс, вариант имеет место быть - очень оригинально).
Наличие конденсаторов - суровая необходимость. Где именно и какой ёмкости - вот предмет моего вопроса и предполагаемого тут обсуждения.
А чтобы узнать что сглаживать - автор статьи именно и подключал осциллограф на управляющие выходы с МК. За что ему низкий поклон - подобных экспериментов ещё не видел. Это даже технически сложно сделать. Осциллограф - тонкая, нежная техника - попробуйте его посадить на бешенную мясорубку (3-8 пропеллеров), которая норовит улететь и покусать вас и всё ваше окружение.
И не надо говорить мне, что надо снимать пропеллеры - без них нагрузка в ходовых цепях существенно ниже.
Вот об этом и статья.
Уважаемый,курите матчасть и лучше не из интернета,а из учебников.
Два конденсатора на схеме,те которые в пикофарадах измеряются нужны для запуска кварцегого резонатора. Но и то только в определенных случаях.
Еще раз повторяю- искать надо того,кто создает помеху,тк повышением емкости вы только сглаживаете картинку(если конденсатор позволяет) Не зря же про low ESR с десяток лет назад мало кто знал даже из свидомых в эдектронике.
ПРомехи измеряют в миллиВольтах,а не в килогерцах. Правда иногда время помехи указывают и оно не должно превышать сколько-то машинных тактов.
А килогерцы помех дают "ложные такты" при выполнении команд микроконтроллером. Отсюда и зависанья-глюки. Мы можем побороть амплитуду помехи (ваши милливольты помех) - зная "мои килогерцы", и правильно подобрав ёмкость.
где крестик перережте и продублируйте проводом ,конденсаторы лучше ставить разной ёмкости
потому как каждый гасит помеху своей длительности . Потому как 10 конденсаторов на0.1мФ
работают иначе 1конденсатора на 1мФ.
Затягу к истине +
просадка по напряжению при импульсной нагрузке.
2-3 диода поставить от переполюсовки они спасут а падение будет меньше
сопротивлением педохранителя можно принебреч оно ничтожно.
Попробуйте как вариант для питания модема отдельный стабилизатор поставить.