Как известно, разводка питания в контроллере APM 2.5 выполнена следующим образом:
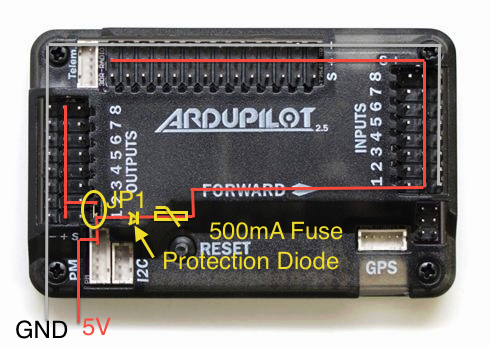
Шина Outputs и разъём питания (PM) отделены от внутренней шины защитным диодом и предохранителем. При подаче питания с ESC или разъёма питания на диоде и предохранителе создаётся постоянное падение напряжения порядка 0.3-0.4В. Именно поэтому, при подаче питания через разъём PM, напряжение на модуле UBEC должно быть 5,3-5,4В. Как вариант, можно подавать питание на контроллер с отдельного UBEC 5.0В, непосредственно на внутреннюю шину, то есть подключить его к выводам питания шин Inputs или Analog, но прошу заметить, я вам этого не советовал.
Исследуем классический вариант подачи питания контроллера, через разъем PM. Вообще в радиоэлектронике считается "плохим тоном" в сильноточные шины и шины с большими пульсациями тока, ставить последовательно диоды, но разработчики контроллера решили именно так, и это действительно оправдано в данном случае, так как иначе пользователи жгли бы UBEC или порты USB при их одновременном включении, к тому же это хоть и «кривая», но защита от переполюсовки источника питания.
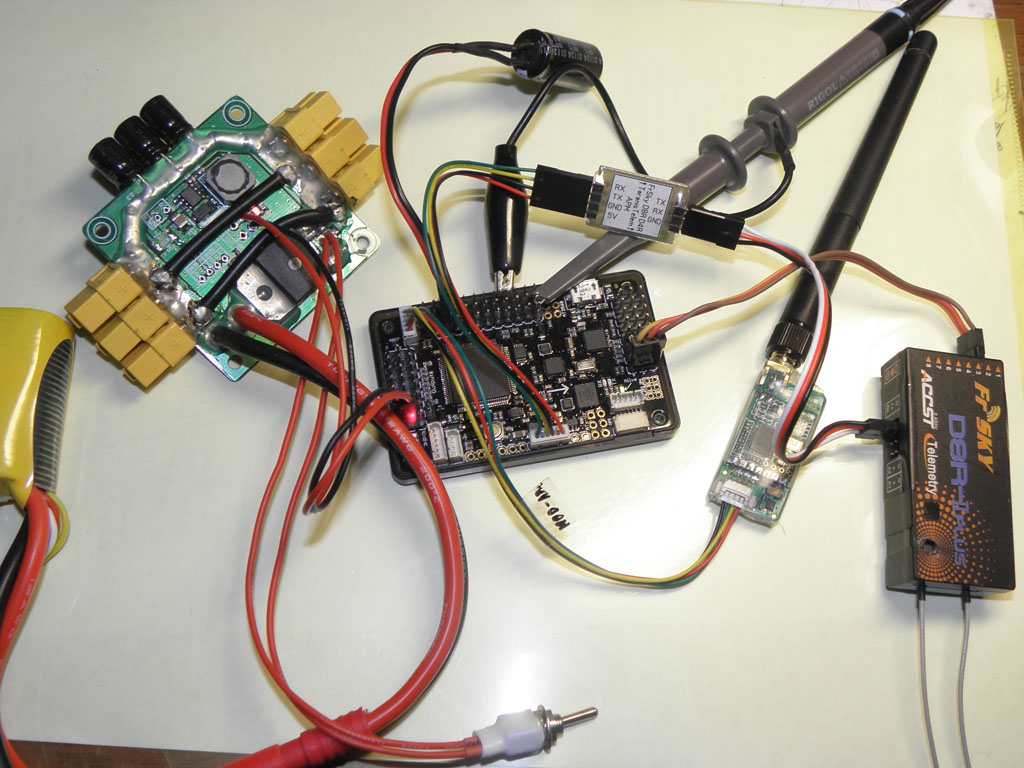
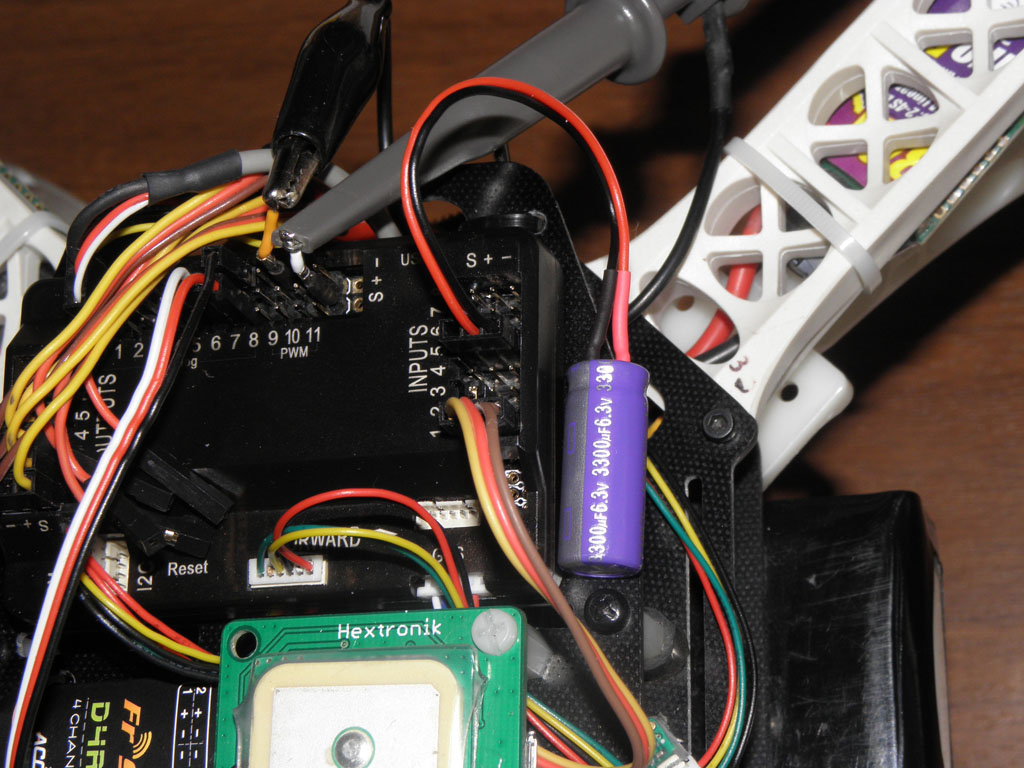
Измерения проводились на полностью собранном квадрокоптере с полётным контроллером HexTronik HKPilot Mega V2.5 и подключенным к нему нижеследующим оборудованием:
1. Система телеметрии 433МГц на UART0
2. Сонар HRLV-MaxSonar-EZ на А0
3. GPS-модуль UBLOX LEA-6H
4. Конвертер Mavlink-to-FrSky на UART2
5. Приёмник FrSky D4R-II с телеметрией в режиме CPPM
6. Регуляторы Afro ESC 30А
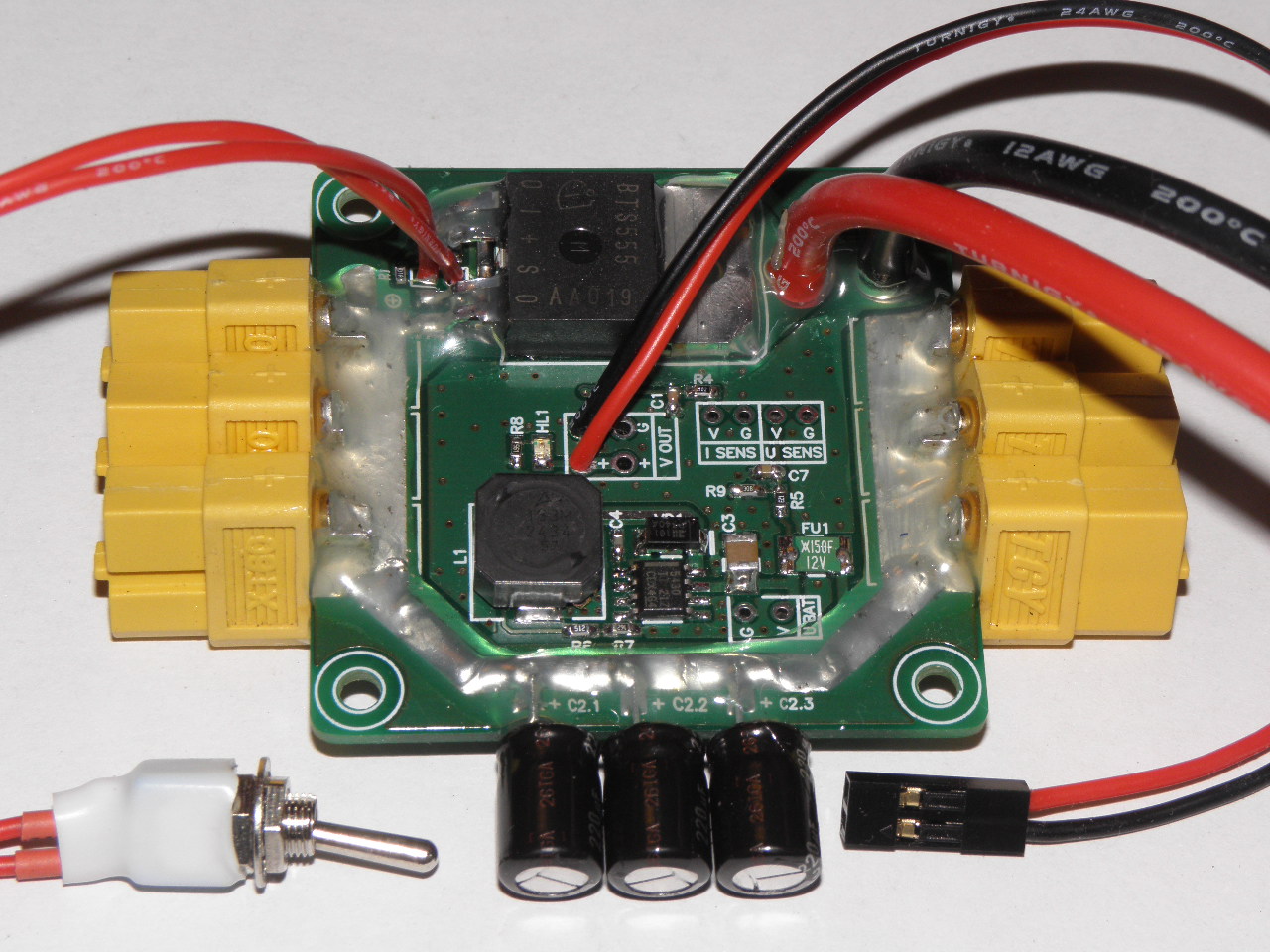
7. Плата питания с ключом на BTS555 и малошумящим UBEC на TPS5430
8. Маломощные светодиоды на А6 и А7
В качестве измерительного прибора использовался осциллограф RIGOL DS1052E, щуп подключался на шины Outputs и Analog. Во время измерений запускался MissionPlanner с подключением к контроллеру через модемы телеметрии.
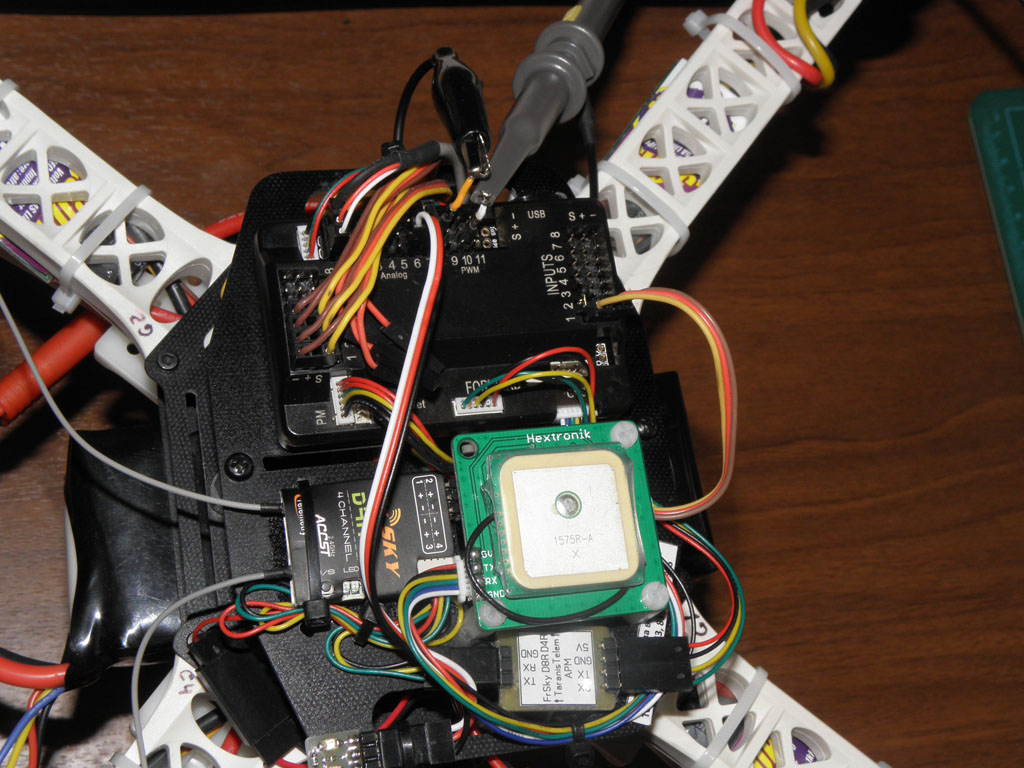
Вид сверху собранного квадрокоптера, с подключением щупа осциллографа на шину Analog:
Плата питания установлена внутри рамы и выглядит так: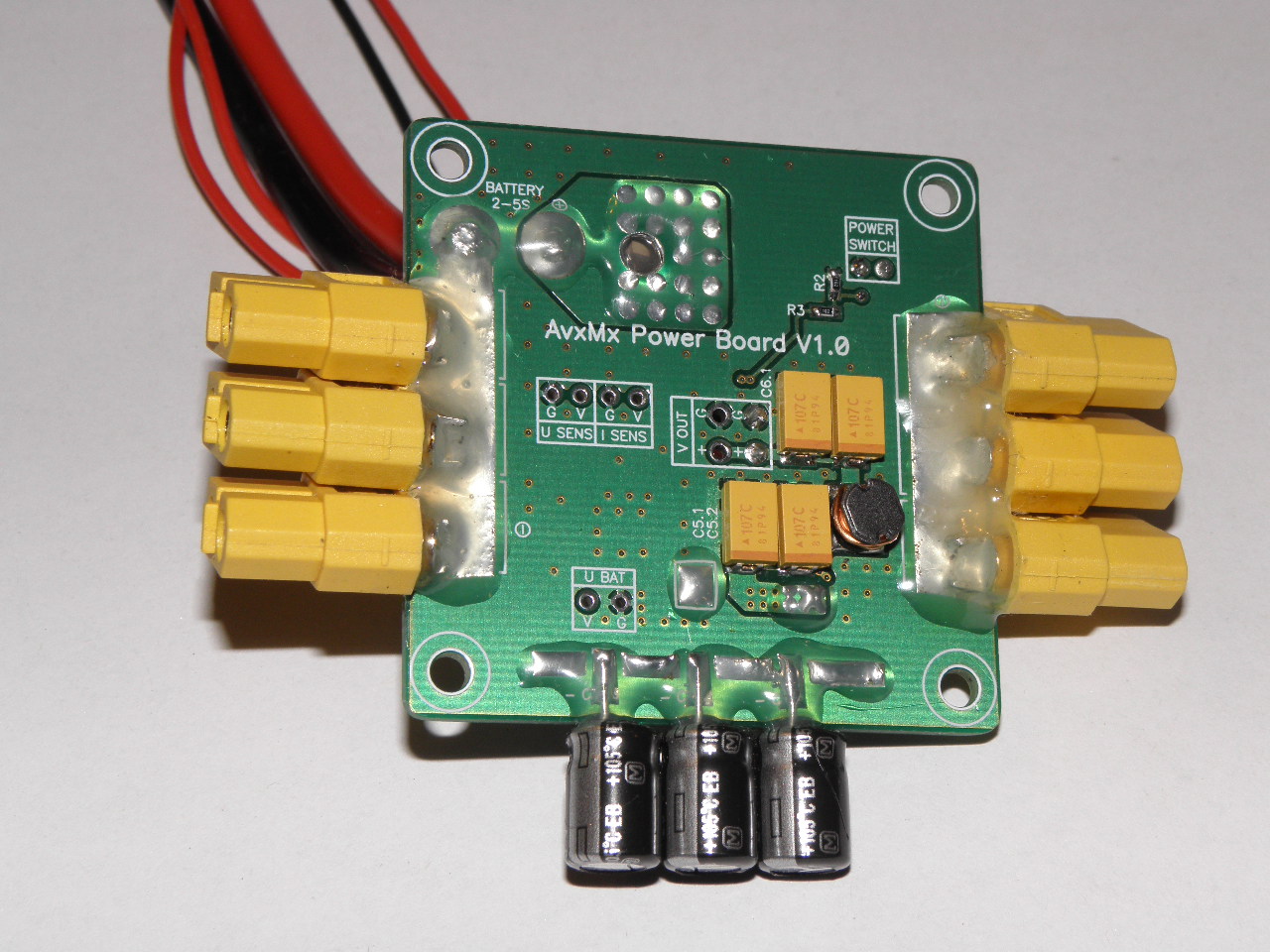
Сначала было произведено измерение на шине Outputs:
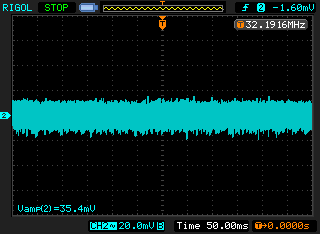
Уровень пульсаций составил 35 милливольт, что в общем, достаточно хороший результат. Например, спецификация ATX допускает уровень пульсаций 50 мВ на выходе компьютерного блока питания по шине 5В при максимальной нагрузке, то есть не более 1% от величины напряжения питания.
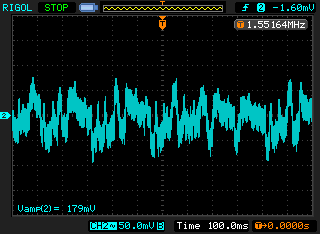
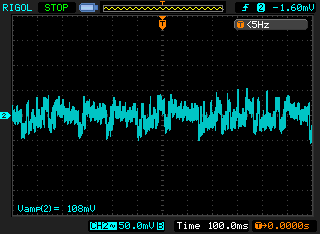
Затем произведён замер на внутренней шине Analog: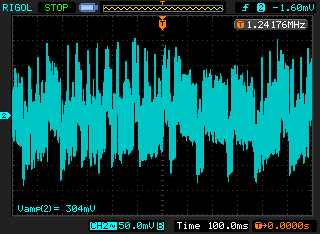
Уровень пульсаций доходил до 320 мВ, что превышало уровень входных пульсаций с платы питания в 9 раз, и составляло 6% от уровня входного напряжения. Это очень много, хотя при этом квадрики на APM летают, без крупных сбоев, в основном ... Впрочем основные датчики сидят на шине 3.3В, иначе им было бы «очень плохо», но нет уверенности в том, что такой уровень пульсаций в сочетании с какими либо электромагнитными помехами, не могут «повесить» контроллер или привести к его сбоям.
Путём отключения и подключения оборудования, выяснилось, что наибольшую долю пульсаций вносит модем телеметрии. В общем, это ожидаемо, так как в момент отправки данных, при выходной мощности 100 мВт, модем создаёт большие пульсации тока, а когда шина питания контроллера, развязана диодом, то большой ток на внутренней шине контроллера, просто просаживает напряжение до текущего прямого напряжения диода на данном токе. После того, как ток в цепи питания уменьшится, напряжение опять подтягивается до большего значения.
Вот график зависимости прямого напряжения от тока, диода MBR120, который установлен в контроллере. На контроллере без периферии у меня на нём падало по постоянке 0,26В с периферией 0,4В: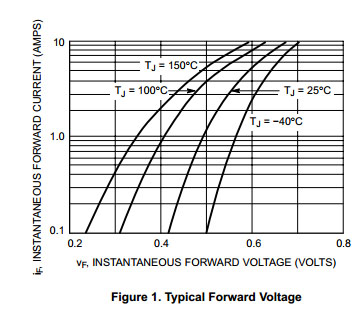
Установка фильтров на периферии (модем в частности), почти ничего не даёт, так как у него длинные пакеты, и сгладить пульсации тока в нем самом проблематично. Мне видится единственное решение сгладить пульсации на шине 5В контроллера, которая развязана от источника питания диодом - шунтирование её ёмкостью. То есть смысл в том, чтобы ток на шине перед диодом не пульсировал, чтобы обеспечивать всегда одно и то же значение прямого напряжения последовательно включенного диода.
Из осциллограммы видно, что большие просадки по напряжению низкочастотные, длительностью до 20 мс и более, компенсировать которые можно установкой конденсаторов большой ёмкости, поэтому в шину Inputs был установлен конденсатор 3300 мкФ, 6.3В:
Уровень пульсаций при этом упал почти в два раза, однако всё ещё, имел довольно большое значение:
Также высокочастотная составляющая шума имела большую амплитуду, поэтому было решено, продолжить борьбу с пульсациями. Для этого, с обратной стороны платы между всеми контактами + и - шин питания, были установлены керамические SMD конденсаторы типоразмера 1206 на 10 мкФ 16В, вот такие:
Такое решение позволило набрать приличную ёмкость, без какого либо увеличения габаритов. Согласен, решение не стандартное, может даже дорогое и не оправданное, но применительно к данному случаю, мне оно понравилось. Конденсаторы пришлось ставить на ребро, так как по-другому, красиво впаять их не получалось: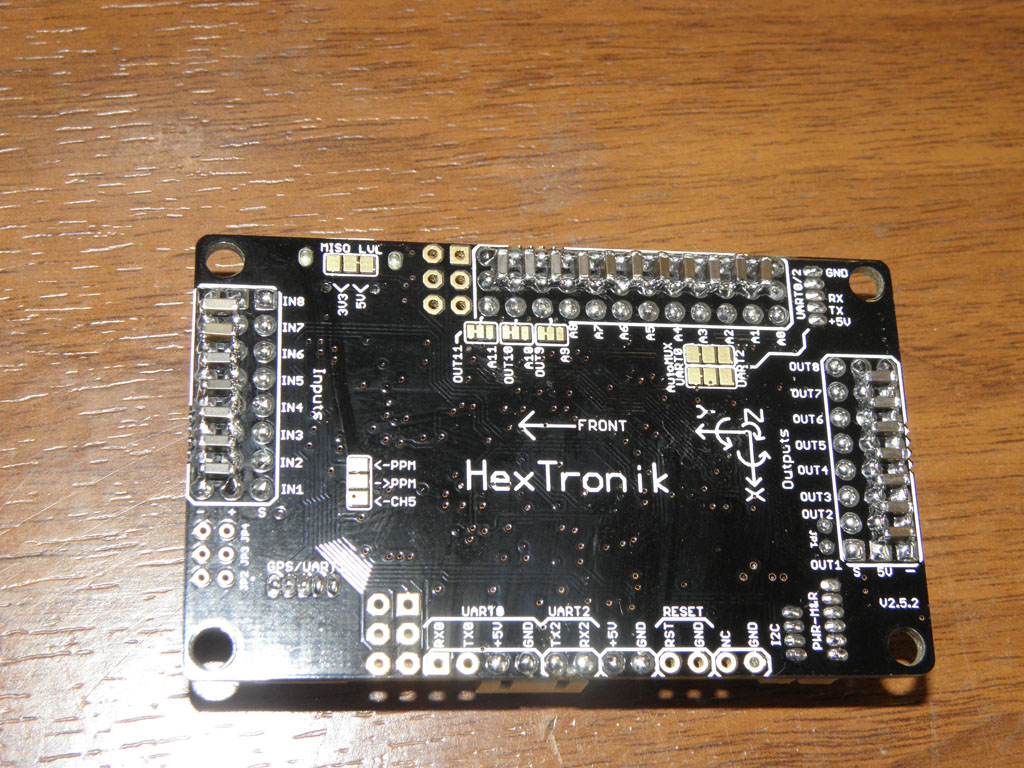
Также с лицевой стороны платы был установлен электролитический конденсатор 220 мкФ 10В диаметром 5 мм, к сожалению большего номинала и размера установить не удалось, иначе корпус не закрывался:
Суммарная ёмкость конденсаторов составила 470 мкФ. Хотя 8 из них висят в шине Outputs, в моём случае они там были не особо нужны.
После этого контроллер был установлен на место, всё подключено как было, кроме внешнего конденсатора. После включения и запуска обмена по телеметрии, результат был такой:
Порадовало то, что конденсаторы на контроллере значительно лучше гасят пульсации, чем внешний конденсатор большой ёмкости, так как кроме низкочастотной составляющей, хорошо справляются и с высокочастотной, за счёт применения керамических конденсаторов и расположения их непосредственно на плате.
С подключенным внешним конденсатором, результат стал лишь немного лучше: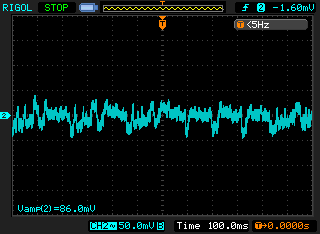
В итоге, удалось добиться уровня пульсаций не более 90 мВ, что в 3.5 раза меньше, чем было.
Стоить отметить, что с запущенными на 50% газа двигателями (с пропеллерами), уровень пульсаций не увеличивался, при этом потребляемый ток составлял 14-15А. Это значит, что силовая часть платы питания и регуляторы, не оказывают существенного влияния на UBEC и контроллер.
Выводы:
1. При питании контроллера APM 2.5 через разъём PM, установка конденсатора большой ёмкости на внутреннюю шину 5В контроллера, это самый быстрый и мало затратный способ, существенно уменьшить уровень пульсаций напряжения на шине питания и как следствие, увеличить надёжность и отказоустойчивость контроллера.
2. Модем телеметрии вносит наибольший вклад в уровень пульсаций по шине питания, при его использовании, необходимы дополнительные меры по фильтрации питающего напряжения на внутренней шине 5В контроллера.
3. Керамические конденсаторы на шинах питания контроллера и небольшой электролитический конденсатор, установленный непосредственно на плату контроллера, лучше справляются с импульсными помехами, чем внешний электролитический конденсатор большой ёмкости.
И на последок: Я вам не советую выполнять описанные модификации контролера APM, это лишь повод для размышления, если вы что-то предпримите, то на свой страх и риск.













https://code.google.com/p/ardupilot-mega/wiki/APM2board
и тут
https://code.google.com/p/ardupilot-mega/wiki/APM25board
единственная поправка там опечатка, должно быть так:
Свод требований к электропитанию
Один источник (допустимо при "настольных" испытаниях, не рекомендуется в полете)
Куда подключен Номинальное напряжение Абсолютный максимум положение JP1
К "Output PWM connector" 5.37V +-0.5 6V JP1 установлен
К "Input PWM connector" 5.00V +-0.5 6V JP1 установлен
Два источника
Примечание: Если JP1 снят, Два источника напряжения должны обеспечивать питание входов и выходов
Куда подключен Номинальное напряжение Абсолютный максимум положение JP1
К "Output PWM connector" 5.00V +-0.5 6V JP1 снят
К "Input PWM connector" 5.00V +-0.5 6V JP1 снят
Резюме - снимаем JP1, подаем два раза по 5 вольт (с разных источников питания) - и летаем без глюков?
"Шина Outputs и разъём питания (PM) отделены от внутренней шины защитным диодом и предохранителем. При подаче питания с ESC или разъёма питания на диоде и предохранителе создаётся падение напряжения порядка 0.3-0.4В. Именно поэтому, при подаче питания через разъём PM, напряжение на модуле UBEC должно быть 5,3-5,4В"
причем 0.37 судя по всему и есть падение напряжения на диоде который когда перемычки нет в цепи не учавствует т.к. во втором случае подается на оба входа по 5В. Другого объяснения этому не вижу.
Возникает вопрос. Не проще ли было убрать перемычку да запитать входы напрямую нежели городить огород с 20 конденсаторами?
Вот зависимость прямого напряжения от тока, диода MBR0120, того что установлен в контроллере:
тогда уж отдельные питатели для аналоговой,цифровой и исполнительной части.
Хотя я не уверен что помехи питания приводят к зависаниям. Может все же это ошибки программистов? Что более вероятно. А самой шумящей нагрузкой как и будет имхо однокристалка.
разобрались и еще вчера мой тезка написал что бороться нужно с причиной помех,а не со следствием.
Я уже вопрос задавал,но видимо он потерялся. Откуда взялась осциллограмма с частотой повторения 15Гц? Это рассинхронизация или как?
Частота повторения 15Гц из-за того, что когда модем начинает отправку данных, он просаживает шину, передаёт он пакеты достаточно большие, поэтому шина остаётся просаженной на весь период передачи, после окончания передачи ток на шине падает, прямое напряжение диода уменьшается, и напряжение на шине опять подтягивается UBEC-ом и т.д.
Тот график котроый вы показали отображает зависимость напряжения от силы тока, ваш ток который потребляет МК с модемом телеметрии в этот график даже не попадает.
Если ток не попадает на график, это не значит что его нет, на диоде падает 0.26В, даже если не подключать периферию. С периферией до 0.4В по постоянке, а при пиковых нагрузках ещё больше.
Далее по статье пару вопросов.
1. при мощности телеметрии 100мватт теоретический уровень потребления при питании от 5В будет около (P=IU, I=P/U, I=0.1/5=0.020А) т.е. ток около 20мА понятное дело это при КПД схемы 100%, но даже если КПД схемы будет 10% то ток будет 200мА, тогда непонятно о каком довольно приличном токе идет речь в вашей статье, цитирую:
"Путём отключения и подключения оборудования, выяснилось, что наибольшую долю пульсаций вносит модем телеметрии. В общем, это ожидаемо, так как в момент отправки данных при выходной мощности 100 мВт, модем потребляет довольно приличный ток."
Согласитесь после 30ти амперных токов регулятора цифра 20-200мА выглядит немного смешно.
2. Далее на ШИМ выходах контроллера впринципе не обязан быть нормальный уровень 5В. Не берусь утвержать, не читал даташит на эту плату, но выходы для сигнала шим, служат чтобы подключать устройства к земле и к сигналному проводу (на контроллере помечен как S). То что там есть броски на выводе (+) по хорошему ни о чем не говорит. Это может быть обычная перегрузка стабилизатора напряжения контроллера который ОБЯЗАТЕЛЬНО должен быть в данной схеме, я бы почитат даташит на пятиногую детальку возле GPS разъема, очень смахивает на линейный стабилизатор напряжения и судя по размерам расчитан он на мизерные токи вроде 10-50мА. который логично что не сможет потянуть модем телеметрии.
3. Но раз уж запитали модем от выхода шима то я бы советовал все же поставить дроссель, с параллельными ему конденсаторами, и проверить осцилографом результат. Не зря во всем мире используют связку кондер-дроссель-кондер. Мы же не умнее всего мира? :) Ну либо запитать его от примитивного линейного стаба - любой кренки или прочего, есть миниатюрные варианты размером 3х5мм которым должны быть вполне по силам эта задача, греться не должно ибо токи микроскопические.Во всяком случае любое из двух решений было бы не столь затратное по времени как пайка штук 20-ти смд конденсаторов с возможностью замкнуть что нибудь невзначай. Более того изначально конденсаторы предназначены для фильтрации напряжения а дроссель для фильтрафии тока, потому и следует их применять в связке. Вообще емкости которые вы в итоге набрали при граммотном использовании смогут сфильтровать раз в 100 большие токи, есть еще негласное правило, 1мкф=1Ватт, и оно вполне себе работает - в блоках питания на 400Ватт стоят батареи кондеров на 300мкф в паре с дросселями:)
ВообщемА то что сделано если честно похоже на танцы с бубнами т.к. вы в итоге нашли часть которая добавляет проблемы с питанием но решили ее очень уж своеобразно.
P.S. что за диод такой MBR0120, в названии не ошиблись? интернет про него ничего не знает.
2. Вы плохо ознакомились со статьёй, там есть в начале осцилограмма, где видно что бросков на стабилизаторе нет, а внутри контроллера нет стабилизатора на 5В.
3. Модем запитан штатно не от выхода ШИМ, фильтрация пульсаций модема, мало эффективна, так как пакеты большие и он долго потребляет большой ток. Я прекрасно представляю как фильтруются помехи и в блоках питания в том числе, предложите своё решение отфильтровать низкочастотные пульсации в шине развязанной от источника питания диодом.
В марке диода ошибся - MBR120
А если модем подключить до диода, то на питание он так влиять не будет. Не проверяли?
Или диод взять Шотки.