Как известно, разводка питания в контроллере APM 2.5 выполнена следующим образом:
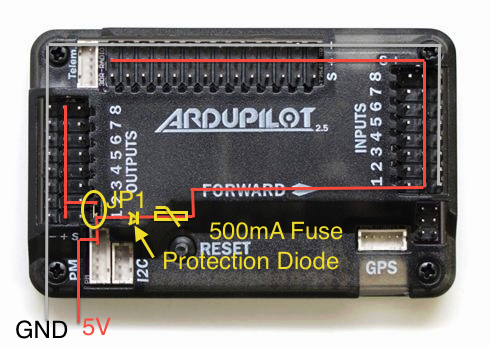
Шина Outputs и разъём питания (PM) отделены от внутренней шины защитным диодом и предохранителем. При подаче питания с ESC или разъёма питания на диоде и предохранителе создаётся постоянное падение напряжения порядка 0.3-0.4В. Именно поэтому, при подаче питания через разъём PM, напряжение на модуле UBEC должно быть 5,3-5,4В. Как вариант, можно подавать питание на контроллер с отдельного UBEC 5.0В, непосредственно на внутреннюю шину, то есть подключить его к выводам питания шин Inputs или Analog, но прошу заметить, я вам этого не советовал.
Исследуем классический вариант подачи питания контроллера, через разъем PM. Вообще в радиоэлектронике считается "плохим тоном" в сильноточные шины и шины с большими пульсациями тока, ставить последовательно диоды, но разработчики контроллера решили именно так, и это действительно оправдано в данном случае, так как иначе пользователи жгли бы UBEC или порты USB при их одновременном включении, к тому же это хоть и «кривая», но защита от переполюсовки источника питания.
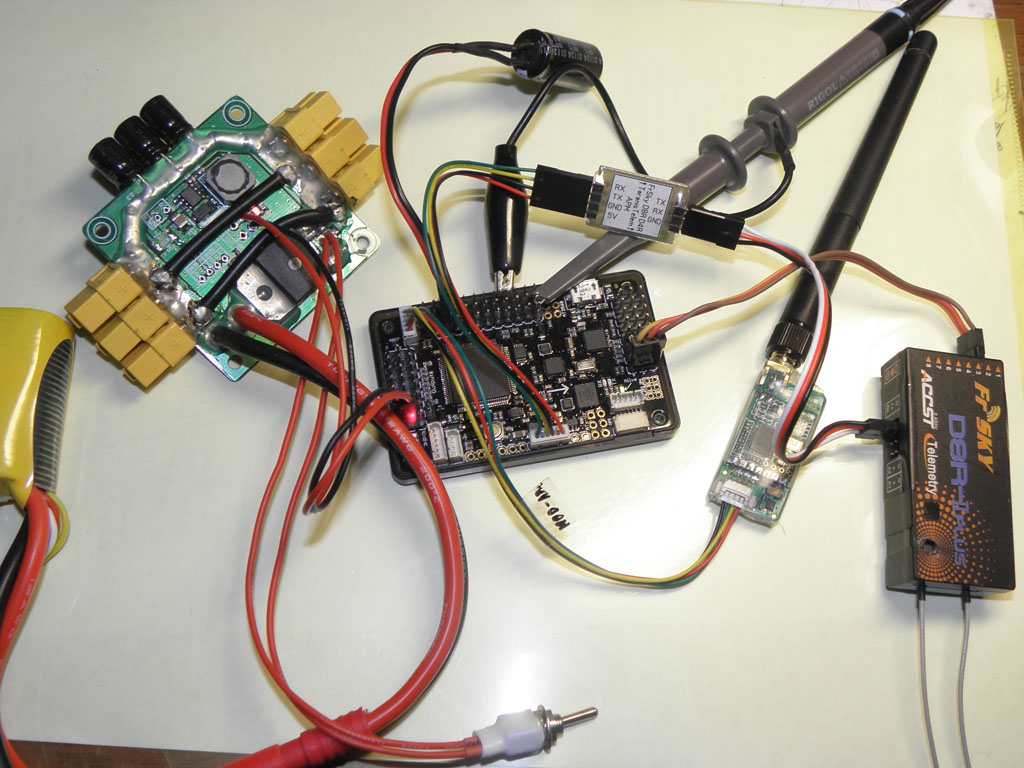
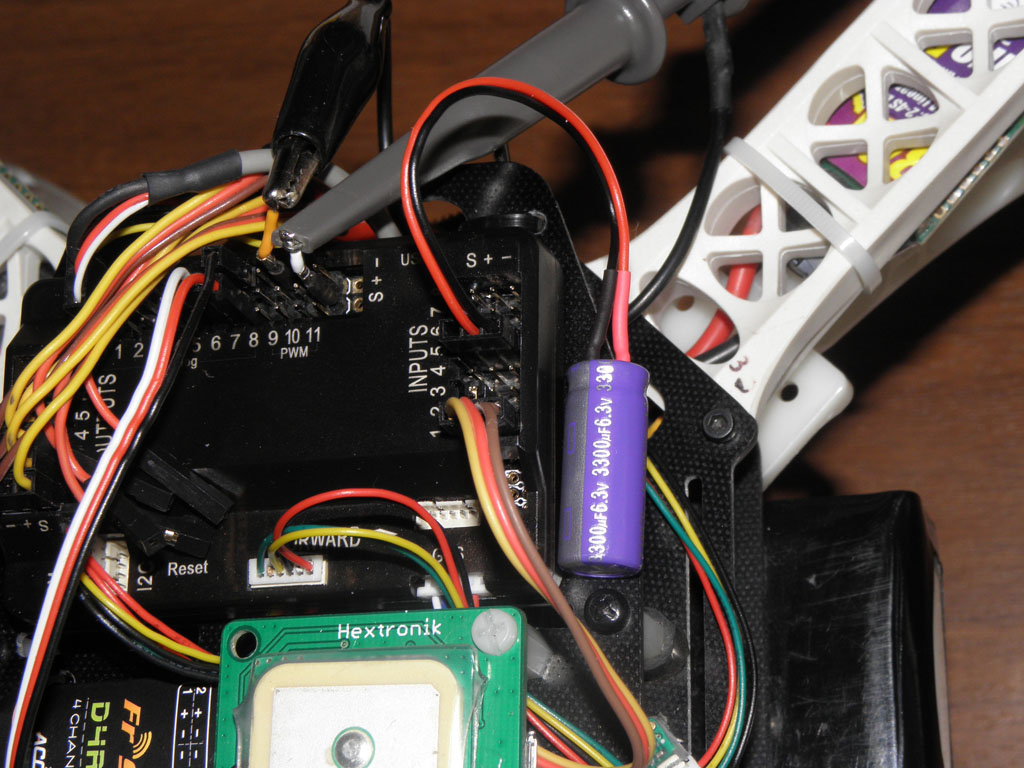
Измерения проводились на полностью собранном квадрокоптере с полётным контроллером HexTronik HKPilot Mega V2.5 и подключенным к нему нижеследующим оборудованием:
1. Система телеметрии 433МГц на UART0
2. Сонар HRLV-MaxSonar-EZ на А0
3. GPS-модуль UBLOX LEA-6H
4. Конвертер Mavlink-to-FrSky на UART2
5. Приёмник FrSky D4R-II с телеметрией в режиме CPPM
6. Регуляторы Afro ESC 30А
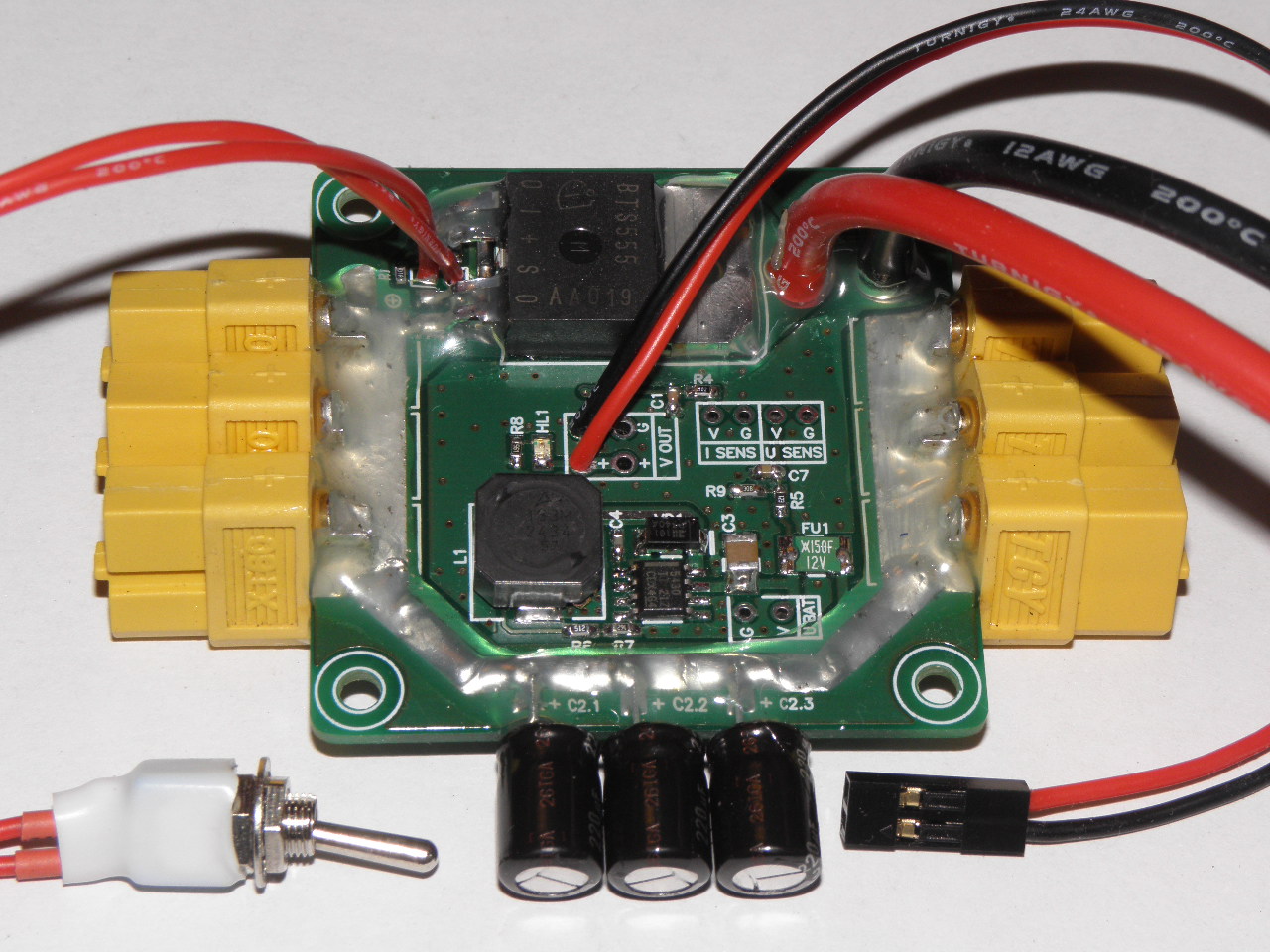
7. Плата питания с ключом на BTS555 и малошумящим UBEC на TPS5430
8. Маломощные светодиоды на А6 и А7
В качестве измерительного прибора использовался осциллограф RIGOL DS1052E, щуп подключался на шины Outputs и Analog. Во время измерений запускался MissionPlanner с подключением к контроллеру через модемы телеметрии.
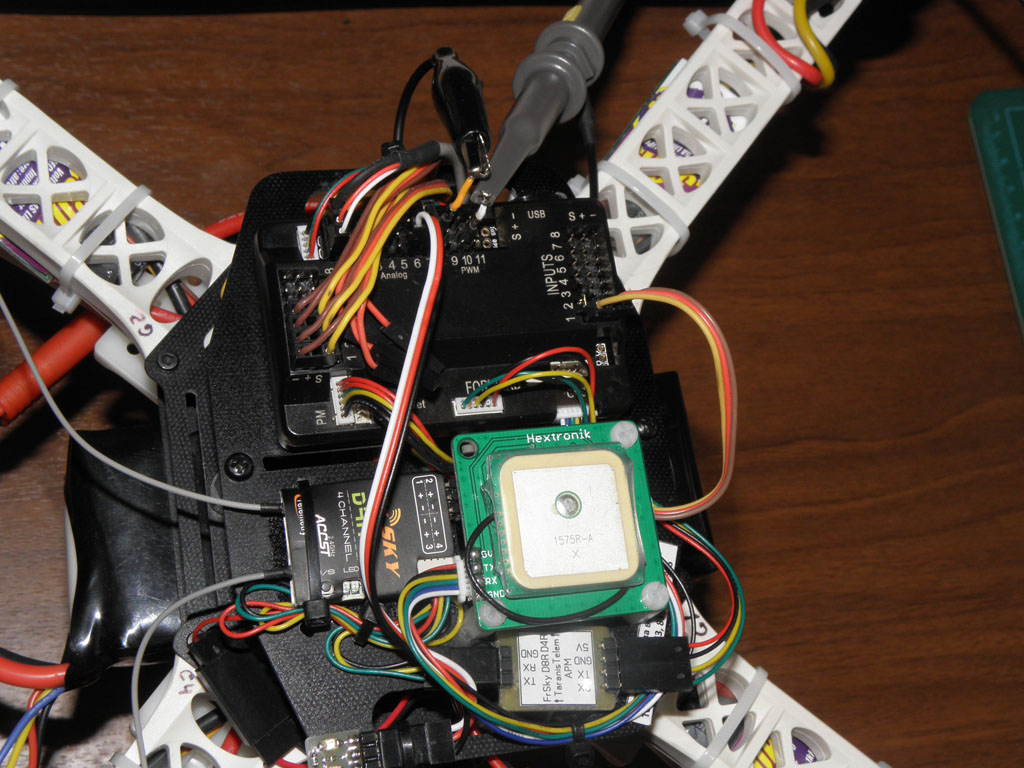
Вид сверху собранного квадрокоптера, с подключением щупа осциллографа на шину Analog:
Плата питания установлена внутри рамы и выглядит так: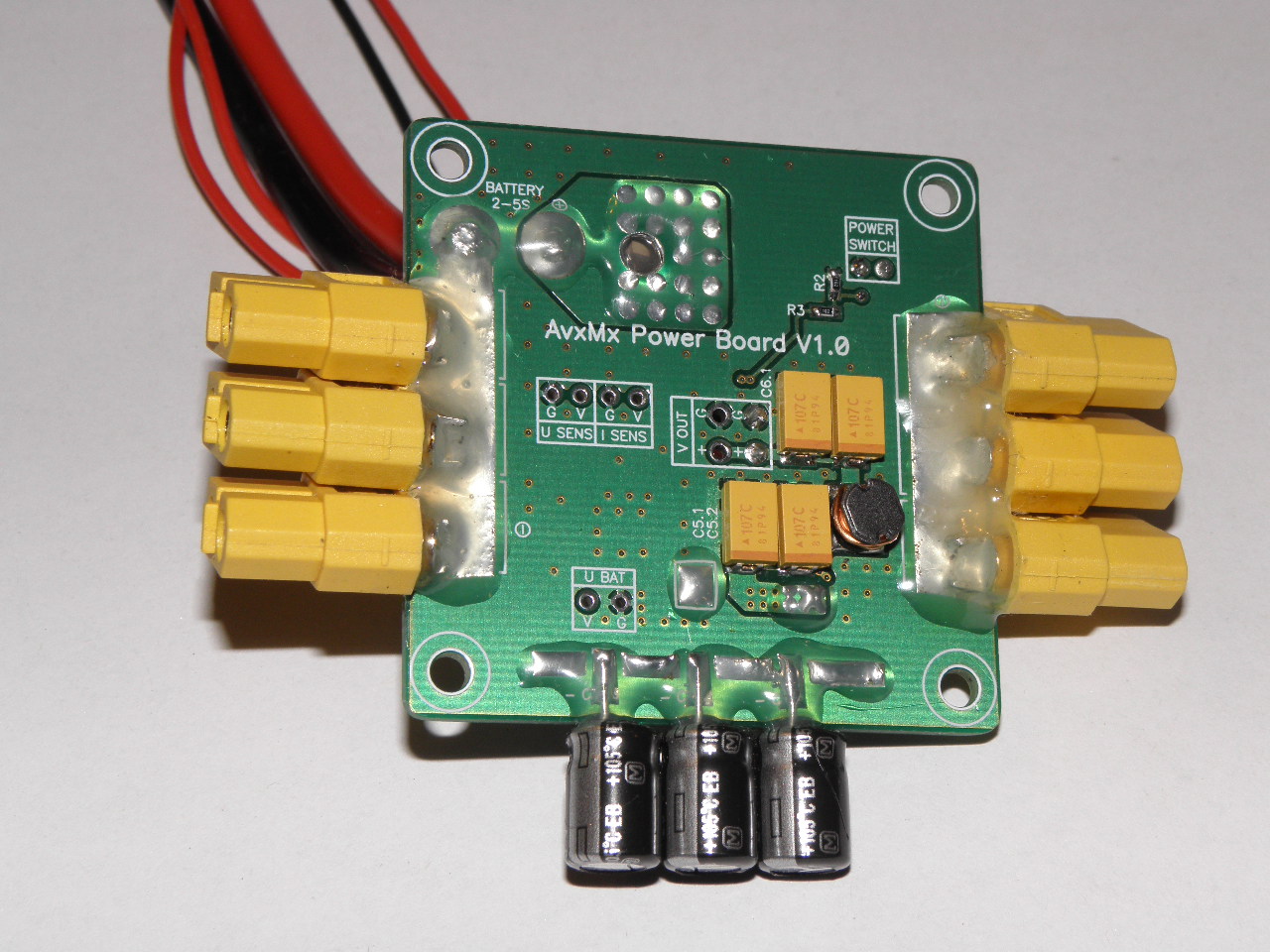
Сначала было произведено измерение на шине Outputs:
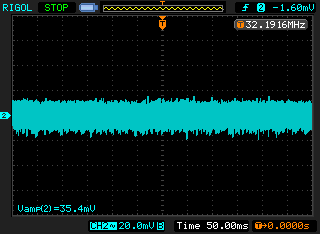
Уровень пульсаций составил 35 милливольт, что в общем, достаточно хороший результат. Например, спецификация ATX допускает уровень пульсаций 50 мВ на выходе компьютерного блока питания по шине 5В при максимальной нагрузке, то есть не более 1% от величины напряжения питания.
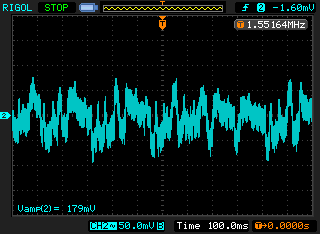
Затем произведён замер на внутренней шине Analog: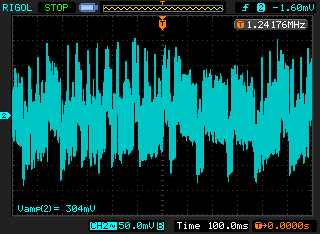
Уровень пульсаций доходил до 320 мВ, что превышало уровень входных пульсаций с платы питания в 9 раз, и составляло 6% от уровня входного напряжения. Это очень много, хотя при этом квадрики на APM летают, без крупных сбоев, в основном ... Впрочем основные датчики сидят на шине 3.3В, иначе им было бы «очень плохо», но нет уверенности в том, что такой уровень пульсаций в сочетании с какими либо электромагнитными помехами, не могут «повесить» контроллер или привести к его сбоям.
Путём отключения и подключения оборудования, выяснилось, что наибольшую долю пульсаций вносит модем телеметрии. В общем, это ожидаемо, так как в момент отправки данных, при выходной мощности 100 мВт, модем создаёт большие пульсации тока, а когда шина питания контроллера, развязана диодом, то большой ток на внутренней шине контроллера, просто просаживает напряжение до текущего прямого напряжения диода на данном токе. После того, как ток в цепи питания уменьшится, напряжение опять подтягивается до большего значения.
Вот график зависимости прямого напряжения от тока, диода MBR120, который установлен в контроллере. На контроллере без периферии у меня на нём падало по постоянке 0,26В с периферией 0,4В: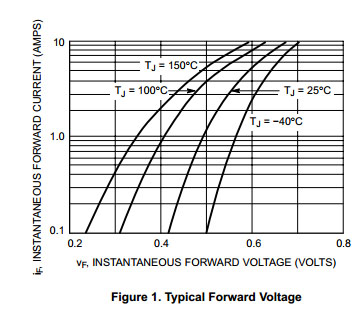
Установка фильтров на периферии (модем в частности), почти ничего не даёт, так как у него длинные пакеты, и сгладить пульсации тока в нем самом проблематично. Мне видится единственное решение сгладить пульсации на шине 5В контроллера, которая развязана от источника питания диодом - шунтирование её ёмкостью. То есть смысл в том, чтобы ток на шине перед диодом не пульсировал, чтобы обеспечивать всегда одно и то же значение прямого напряжения последовательно включенного диода.
Из осциллограммы видно, что большие просадки по напряжению низкочастотные, длительностью до 20 мс и более, компенсировать которые можно установкой конденсаторов большой ёмкости, поэтому в шину Inputs был установлен конденсатор 3300 мкФ, 6.3В:
Уровень пульсаций при этом упал почти в два раза, однако всё ещё, имел довольно большое значение:
Также высокочастотная составляющая шума имела большую амплитуду, поэтому было решено, продолжить борьбу с пульсациями. Для этого, с обратной стороны платы между всеми контактами + и - шин питания, были установлены керамические SMD конденсаторы типоразмера 1206 на 10 мкФ 16В, вот такие:
Такое решение позволило набрать приличную ёмкость, без какого либо увеличения габаритов. Согласен, решение не стандартное, может даже дорогое и не оправданное, но применительно к данному случаю, мне оно понравилось. Конденсаторы пришлось ставить на ребро, так как по-другому, красиво впаять их не получалось: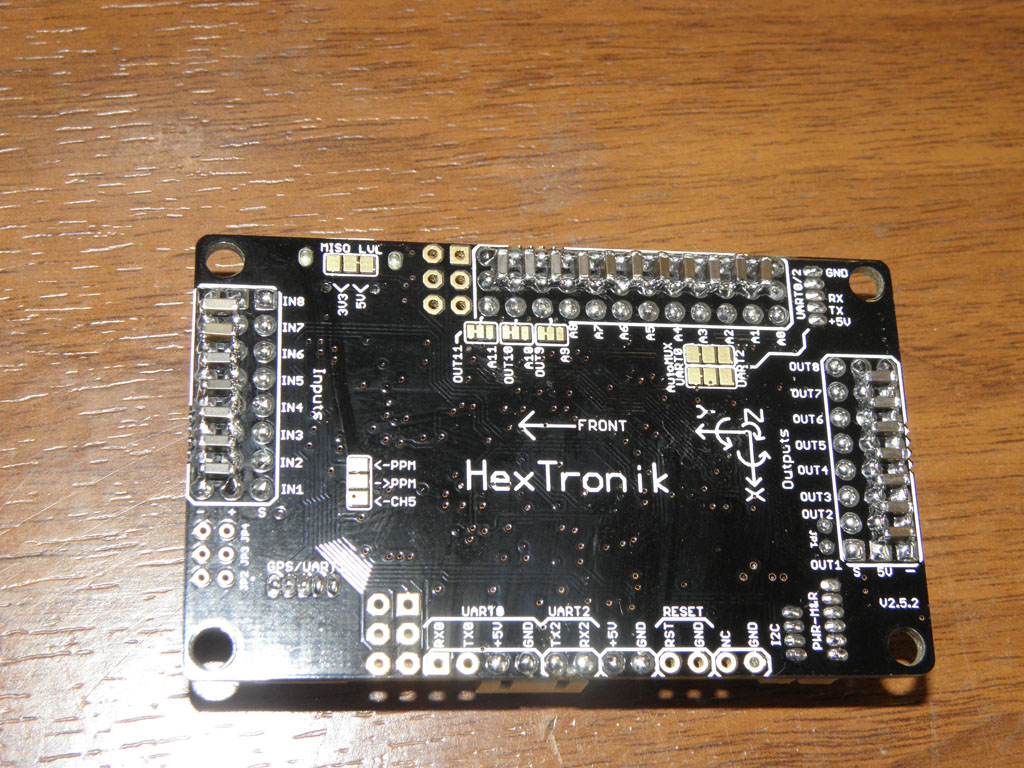
Также с лицевой стороны платы был установлен электролитический конденсатор 220 мкФ 10В диаметром 5 мм, к сожалению большего номинала и размера установить не удалось, иначе корпус не закрывался:
Суммарная ёмкость конденсаторов составила 470 мкФ. Хотя 8 из них висят в шине Outputs, в моём случае они там были не особо нужны.
После этого контроллер был установлен на место, всё подключено как было, кроме внешнего конденсатора. После включения и запуска обмена по телеметрии, результат был такой:
Порадовало то, что конденсаторы на контроллере значительно лучше гасят пульсации, чем внешний конденсатор большой ёмкости, так как кроме низкочастотной составляющей, хорошо справляются и с высокочастотной, за счёт применения керамических конденсаторов и расположения их непосредственно на плате.
С подключенным внешним конденсатором, результат стал лишь немного лучше:
В итоге, удалось добиться уровня пульсаций не более 90 мВ, что в 3.5 раза меньше, чем было.
Стоить отметить, что с запущенными на 50% газа двигателями (с пропеллерами), уровень пульсаций не увеличивался, при этом потребляемый ток составлял 14-15А. Это значит, что силовая часть платы питания и регуляторы, не оказывают существенного влияния на UBEC и контроллер.
Выводы:
1. При питании контроллера APM 2.5 через разъём PM, установка конденсатора большой ёмкости на внутреннюю шину 5В контроллера, это самый быстрый и мало затратный способ, существенно уменьшить уровень пульсаций напряжения на шине питания и как следствие, увеличить надёжность и отказоустойчивость контроллера.
2. Модем телеметрии вносит наибольший вклад в уровень пульсаций по шине питания, при его использовании, необходимы дополнительные меры по фильтрации питающего напряжения на внутренней шине 5В контроллера.
3. Керамические конденсаторы на шинах питания контроллера и небольшой электролитический конденсатор, установленный непосредственно на плату контроллера, лучше справляются с импульсными помехами, чем внешний электролитический конденсатор большой ёмкости.
И на последок: Я вам не советую выполнять описанные модификации контролера APM, это лишь повод для размышления, если вы что-то предпримите, то на свой страх и риск.













И здесь правильно сказали, дросселя по питанию вам помогут. Один между BEC и Ардупилотом, еще один между Ардупилотом и модемом.
Предлагаю ставить два не таких мощных кондера. Один в параллель с входящим питанием, один в параллель с электроникой, питаемой контроллером. Там все запараллелено, чего не скажешь про вход питания на контроллере. Вопрос - какой ёмкости должны быть эти кондеры? как ответить на этот вопрос не омея осциллографа?
В импульсниках на выходе всегда стоит дроссель, но тоже не более 200мкГн. После еще желательно одно звено фильтра. т.е. еще один дроссель (~10мкГн) и конденсатор (100-200мкФ). Причем нагрузку и логику лучшепитать отдельно, каждую через свой фильтр. т.е. в случае радиомодема, его лучше запитать не с ардупилота, а прямо с бека через свой фильтр.
Вот приведу пример стандартного импульсного стабилизатора на mc34063 в типовом включении. Обратите внимание на дополнительный фильтр на выходе. Такими фильтрами и желательно разветвлять питание на все девайсы которые вы подключаете к беку.
Пример типовой схемы (взял первую попавшуюся): http://dics.voicecontrol.ro/tutorials/mc34063/step_down.jpg
1)Входной фильтр с большими емкостями (у нас это батарея);
2) стабилизатор напряжения (7805, крен, 1117st5 и т.п.);
3) выходной фильр (с небольшой емкостью, иначе будет большой ток при включении);
Импульсный:
1) Входной фильтр с небольшой емкостью (особо не важно что здесь твориться, поскольку импульсник и так шумит);
2) накачка для выходного дросселя, шим-контроллер с обратной связью и сам дроссель (собственно этот дроссель начинает работать на сглаживание пульсаций когда накачается выходной конденсатор)
3) выходной конденсатор большой емкости (чем больше тем лучше, но в меру. были случаи пробоя дросселей и выходных ключей).
У импульсника выходной конденсатор накачивается постепенно и во время работы получает энергию небольшими порциями по мере разряда на нагрузку.
Импульсные обратноходные у нас не применются. Сложные очень. Там минимум трехобмоточнй трансформатор, где одна из обмоток с конденсатором настроена в резонанс. Плюс куча обвязки. К стати да в них больших емкостей на выходе обычно не ставят. Может не стартовать. Но почти всегда есть LC-фильтры
Хочу несколько вопросов задать? Вы какой язык в школе изучали? Что означает step down на вашей ссылке выше?
Емкость конденсатора в схеме напрямую будет зависеть от частоты и нагрузки. Не задумывались почему LOW ESR стали выпускать конденсаторы? Ответ простой-высокая частота просто вредна для электролитического конденсатора,а любая ключевая схема стабилизации или преобразования вызывает огромный спектр гармоник.
Я хоть теорию и подзабыл,но не настолько же.
Ну я вообще-то тоже не настолько крут в электротехнике. Радиолюбитель всего лишь. Причем специализируюсь по цифровым железкам и МК.
"Вы какой язык в школе изучали?"
Как и вы - русский. В мокшанском, что нам пытались привить в 80х, не преуспел. Не родной.
Ну да, язык у меня не подвешен. Мысли излогать не умею. Согласен
"Что означает step down на вашей ссылке выше?"
Это первая попавная под руку схема с LC-фильтром.
Да и причем здесь ESR?
Но если по существу, то в таких стабилизаторах конденсатор фактически на переменном токе и не работает. Знаете почему туда китайцы незадумываясь ставят ширпотреб всякий? Фактически переменная составляющая туда попадает только во время пуска стабилизатора (к стати самый больной для них режим, пожелые конденсаторы как раз при включении и умирают). И то скважность настолько большая, что фактически импульсы гасится дросселем. Во время штатной работы стабилизатора, там постоянное напряжение промодулированное пилой в несколько сотых миливольт амплитудой. ESR влияет конечно, но только при пуске и изменении нагрузки.
Я не зря про язык вспомнил,правда забыл упомянуть иностранный. Просто многие в школе немецкий учили и понять сходство между step down и fly back не смогут.
Мне лениво листать поисковики что бы казаться грамотным,но обратноходовая (fly back) схема пошла со схемотехники строчной развертки и как бы не обзывалась принцип основан на ЭДС самоиндукции. Притом это процесс имеетнекоторую частоту и в силу физики и математики еще и гармонические составляющие.
Причем ESR,да притом что электролиты на больших частотах начинают разогреваться и терять свои свойства. Уже целое поколение ремонтеров выросло в результате этого.
Что касается шумов на выходе, то как раз там онигенерируются самой нагрузкой. По этому и принято вешать керамику на питание микросхем (чтоб не звинели в шину питания) и разводить отдельно питание по разным блокам, каждый со своим LC
Со вторй частью поста полностью согласен,а вот с первой нет. Если посмотреть осциллограммы без нагррузки и сглаживания,то увидим на выходе классическое разложение по гармоникам(ряд Фурье)
А делать гирлянду из кондесаторов первой попавшейся емкости по кругу как минимум смысла не имеет.
Бывали случаи (и не только на Atmelовских МК, на STMовской Назе тоже), когда коптер переставал реагировать на команды, и сам собой куда-нибудь летел.
Это не значит, что наш коптер непременно куда-то улетит. Это значит, что лучше летать недалеко, много от него не требовать и быть морально и технически готовым к улёту коптера. Технически готовым - подумайте о средствах поиска беглеца.
Мой первый коптер улетел из-за наводок ЭМ на датчик компаса - поставил симпл режим, когда пытался его подтянуть к себе ближе - а у него компас сбился. И коптер попутал направление ко мне (датчика ЖПС тоже не было на коптере). И было пару случаев, когда переставал реагировать на команды - то ли заглючил контроллер, то ли сигнал пропадал.
Резюме: так делать можно только если ОЧЕНЬ хочется летать. Но летать осторожно и недолго. Купите DC-DC преобразователь в любом радиомагазине - цена в пределах 300 рублей. Немного - в сравнении с ценой готового коптера (который можете потерять).
Игорь, без обид - сколько коптеров вы построили?
В коптерах все немного не так как, на самолетах. Там больше чувствительной электроники и гуляют ГОРАЗДО большие токи. У некоторых в небе летает КИЛОВАТТ мощности!!!! И это всего лишь средненький коптер. Коптеры - это не лучше и не хуже ни самолетов ни машин ни катеров - это просто немного по-другому.
Мира вам!
Законы электричества везде одинаковые,бодь то коптер или подводная лодка. А борьба с помехами добавлением конденсаторов напоминает мне старый грузинский фильм,где с дерева веревкой человека снимали,только потому,что вчера той же веревкой из колодца вытаскивали.
Так давайте правильно вопросы ставить! Мне некогда видео разглядывать,тем более когда 99% на превью я карту полета вижу и музон вместо комментариев.
В электронике чудес не бывает и кондер 1000х10 с неизвестным ESR не панацея.